Несимметричный дифференциал — Энциклопедия по машиностроению XXL
Несимметричный дифференциал в разветвленной передаче используется для осуществления режима поворота транспортной машины (рис. 10.2.32). Два одинаковых несимметричных дифференциала J и С2 соединены постоянно и симметрично с выходными звеньями BJ и В2. С каждым из выходных звеньев соединено солнечное колесо и водило другого дифференциала. Центральные колеса bi и bj могут быть соединены с валом двигателя Д муфтами 1 и 2. [c.582]Устранить перечисленные отрицательные явления можно применением в раздаточной коробке межосевого дифференциала. Он позволяет валам 5 я 8 (рис. 119, б, в) вращаться с неодинаковыми угловыми скоростями. Распределение крутящих моментов между валами 5, 8 будет всегда одинаковым — 1 1 для симметричного дифференциала 5повышения проходимости автомобилей межосевые дифференци- [c.

Раздаточная коробка с дифференциальным приводом на передний средний и задний ведущие мосты показана на рис. 122. В ней крутящий момент от ведущего вала 4 к валу 1 привода переднего моста и к валу 12 привода среднего и заднего мостов передается через несимметричный дифференциал. Все шестерни раздаточной коробки имеют косые зубья и находятся в постоянном зацеплении. Включение низшей передачи в раздаточной коробке осуществляется перемещением муфты 6 вправо, а высшей — влево. [c.187]
| Фиг. 809. Несимметричный дифференциал. Результирующее вращение на водиле не пропорционально сумме чисел оборотов центральных колес. Вычисление следует производить непосредственно по формуле (1) (см. стр. 203). Может применяться в качестве уравнительного механизма. |
 Чтобы использовать автомобиль типа 4 X 4 в нормальных дорожных условиях с меньшими потерями на передачу и с большой скоростью, шестерню 5 отъединяют от карданного вала, идущего к передним колесам, и неподвижно сцепляют с картером, вследствие чего число оборотов шестерни заднего привода увеличится в отношении (2а+Ь) Ь (см. ниже раздел Несимметричный дифференциал ).
Чтобы использовать автомобиль типа 4 X 4 в нормальных дорожных условиях с меньшими потерями на передачу и с большой скоростью, шестерню 5 отъединяют от карданного вала, идущего к передним колесам, и неподвижно сцепляют с картером, вследствие чего число оборотов шестерни заднего привода увеличится в отношении (2а+Ь) Ь (см. ниже раздел Несимметричный дифференциал ).
На фиг. 49 изображен схематически в разрезе типовой несимметричный дифференциал, где отдельные размеры обозначены теми же буквами, что и на схеме, заменяющей дифференциальный механизм (фиг. 50). Имеем передаточные отношения [c.49]
| Фиг. 49. Разрез несимметричного дифференциала (схематический). |
| Фиг. 50. Схема, заменяющая механизм несимметричного дифференциала. |

На рис. 26 показаны схемы простых зубчатых дифференциалов. Схема конического несимметричного дифференциала показана на рис. а, цилиндрического — на рис. б, а симметричного конического и цилиндрического — на рис. виг. [c.67]
Связь между передними и задними мостами у автомобилей с отключаемыми передними мостами блокированная (ГАЗ-66, ЗИЛ-131), у автомобилей с постоянно включенными мостами дифференциальная (КАЗ-4540, Урал-4320 ). У трехосных автомобилей межосевой дифференциал в раздаточной коробке делают несимметричным, распределяющим крутящий момент в соотношении 1 2 у двухосных и четырехосных — симметричным, с соотношением крутящих моментов к передним и задним мостам 1 1.
Прямозубые конические колеса дифференциала автомобиля, обычно имеющие малое число зубьев и передающие большие нагрузки, изготовляют с углом зацепления а = 22° 30, а более нагруженные — с углом а = 25°. Так как у гипоидных передач профиль зубьев несимметричный, принято задавать суммарный угол зацепления. Сумма углов зацепления обеих сторон зуба для гипоидных передач общего машиностроения равна 42° 30, грузовых автомобилей и тракторов 45°, легковых автомобилей 38°.
[c.54]
Сумма углов зацепления обеих сторон зуба для гипоидных передач общего машиностроения равна 42° 30, грузовых автомобилей и тракторов 45°, легковых автомобилей 38°.
[c.54]
Главная передача и дифференциал заключены в картер, к которому крепятся кожухи полуосей, образуя ведущий мост. Главная передача переднего ведущего моста расположена несимметрично по отношению
Дифференциал, у которого солнечные колеса имеют одинаковое число зубьев, называют симметричным. Если число зубьев у этих колес разное, то дифференциал называют несимметричным. При симметричном дифференциале [c.98]
При использовании на кране электрических машин переменного тока грузоподъемные лебедки основного подъема снабжают двумя электродвигателями, соединенными цилиндрическим несимметричным дифференциалом. Од1 и пз электродвигателей называется основным, а второй—дополнительным. Мощность основного электродвигателя в 5—8 раз превосходит мощность дополнительного.
Таким образом, распределение моментов между осями при несимметричном дифференциале зависит от значения передаточного числа дифференциала ( д). В частном случае, когда Г1== Гг и = = / 2 (симметричный дифференциал), [c.283]
Симметричный меж осевой дифференциал применяют в тех случаях, когда сцепные веса обеих ведущих осей одинаковы. В противном случае используют дифференциал несимметричного типа.
Дифференциал, распределяющий крутящий момент между полуосями поровну, называется симметричным, и несимметричным, если он распределяет крутящий момент между полуосями не поровну.
Схема сил, действующих на сателлит симметричного конического дифференциала, показана на рис. 26, д, а несимметричного — на рис. 26, е. [c.70]
Рассмотрим теперь случай несимметричного дифференциала. Его примером может служить дифференциал, представленный на рис. 520 при Г1 + Г4. Пусть, например, = 5 4. Тогда г4 1 = —5, и формула (24) обращается в [c.534]
| Рис. 3.214. Несимметричный дифференциал. Результирующее вращение на водиле 1 не пропо>рционально сумме чисел оборотов центральных колес 21 и гд. Вычисление следует производить непосредственно по формуле (1) (см. стр. 225). Может применяться в качестве уравнительного механиз1ма. Зубчатые колеса 22 и 2з а также 24 и 25 жестко соединшы между собой. |
 33, в. В дифференциале имеются двойные конические сателлиты 4. Через шестерню 2 они соединяются с его передней осью, а через шестерню 12—с задней. Из условия равновесия блока сателлитов относительно его оси РхГ = Р2Г2 или
33, в. В дифференциале имеются двойные конические сателлиты 4. Через шестерню 2 они соединяются с его передней осью, а через шестерню 12—с задней. Из условия равновесия блока сателлитов относительно его оси РхГ = Р2Г2 или
Если включены обе муфты i и 2, то оба дифференциала вращаются как одно целое с вьЕходными звеньями В1 и В2 и осуществляется режим движения машины прямо. Если включена только одна муфта I или 2, то вступает в действие дифференциал соответственно l или С2 и осуществляется поворот машины в одну или другую сторону. Происходит это потому, что устанавливается соотношение моментов, соответствующее включенному несимметричному дифференциалу при включенной муфте 1 [c.582]
Конструкция несимметричного межосевого дифференциала с цилиндрическими сателлитами, распределяющего момент иа передний и задний мосты трехосного автомобиля ( Урал-375 ), представлена на рис. VI. 16. Момент от промежуточного вала 12 раздаточной коробки передается на шестерню 5, прнболченную к корпусу 6 межосевого дифференциала.
ДИФФЕРЕНЦИАЛЬНЫЙ М. (ДИФФЕРЕНЦИАЛ) (от лат. differentia -разность, различие) — м., обеспечивающий движение звеньев с различными скоростями при сохранении соотношения сил, действующих на эти звенья. В зависимости от обеспечиваемого соотношения сил различают Д. симметричный — при равных силах (без учета потерь на трение) и несимметричный — при неравных силах (см., например. Суммирующий механизм). [c.98]
Четырехскоростная лебедка СЛ-5001А имеет два электродвигателя мощностью 22 и 16 кВт, соединенных несимметричным дифференциалом, размещенным в корпусе цилиндрического двухпарного редуктора. Шестерня первой (быстроходной) пары зубчатых колес редуктора выполнена заодно с водилом дифференциала (см. рис. 56). Входные валы дифференциала непосредственно соединены зубчато-подвижными муфтами с валами электродвигателей. Соединительная муфта имеет тормозной шкив. Максимальная скорость навивки каната (v — Vi- -V2) в этой лебедке достигается включением обоих электродвигателей в одну сторону (на подъем). Вторая по величине скорость навивки каната получается при включении электродвигателя мощностью 22 кВт. Минимальная скорость получается при включении электродвигателей в разныестороны v=vi—Vz). Часто вал одного электродвигателя соединяют с валом дифференциала с помощью дополнительного редуктора, а вал второго электродвигателя — непосредственно со вторым валом дифференциала. Это позволяет оснащать лебедку элект-
[c.98]
Соединительная муфта имеет тормозной шкив. Максимальная скорость навивки каната (v — Vi- -V2) в этой лебедке достигается включением обоих электродвигателей в одну сторону (на подъем). Вторая по величине скорость навивки каната получается при включении электродвигателя мощностью 22 кВт. Минимальная скорость получается при включении электродвигателей в разныестороны v=vi—Vz). Часто вал одного электродвигателя соединяют с валом дифференциала с помощью дополнительного редуктора, а вал второго электродвигателя — непосредственно со вторым валом дифференциала. Это позволяет оснащать лебедку элект-
[c.98]
Автомобильные дифференциалы
Дифференциал — его назначение и устройство.
При движении автомобиля крутящий момент от коленвала двигателя передается коробке передач и затем, через главную передачу и дифференциал, на ведущие колеса. Главная передача позволяет увеличивать или уменьшать крутящий момент передаваемый колесам автомобиля и одновременно уменьшать и соответственно увеличивать скорость вращения колес. Передаточное число в главной передаче подбирается таким образом, что максимальный крутящий момент и частота вращения ведущих колес находятся в наиболее оптимальных значениях для конкретного автомобиля. Кроме того, главная передача очень часто является объектом тюнинга автомобиля.
Главная передача автомобиля — это не что иное, как шестеренчатый понижающий редуктор, в котором ведущая шестерня связана с вторичным валом КПП, а ведомая – с колесами автомобиля. По типу зубчатого соединения главные передачи различаются на следующие разновидности:
- цилиндрическая – в большинстве случаев применяется на автомобилях с поперечным расположением двигателя и коробки передач и передним приводом;
- коническая – применяется очень редко, так как имеет большие габариты и высокий уровень шума;
- гипоидная – наиболее востребованная разновидность главной передачи, которая применяется на большинстве автомобилей с классическим задним приводом. Гипоидная передача отличается малыми размерами и низким уровнем шума;
- червячная – практически не применяется на автомобилях по причине трудоемкости изготовления и высокой стоимости.


Также стоит отметить, что автомобили с передним и задним приводом имеют различное расположение главной передачи. В переднеприводных автомобилях с поперечным расположением КПП и силового агрегата, цилиндрическая главная передача располагается непосредственно в картере КПП. В автомобилях с классическим задним приводом главная передача установлена в корпусе ведущего моста и соединена с коробкой передач посредством карданного вала. В функционал гипоидной передачи заднеприводного автомобиля также входит и разворот вращения на 90 градусов за счет конических шестерен. Несмотря на различные типы и расположение, предназначение главной передачи остается неизменным.
Дифференциал автомобиля чаще всего совмещен с главной передачей и располагается соответственно в картере коробки передач или в корпусе заднего моста. Однако дифференциал может быть установлен и между ведущими осями полноприводного автомобиля. Дифференциал представляет собой планетарный редуктор и делится на следующие разновидности:
- конический – в большинстве случаев устанавливается совместно с главной передачей между колесами одной приводной оси;
- цилиндрический – наиболее часто применяется для развязки ведущих осей полноприводных автомобилей;
- червячный – является универсальным и устанавливается как между колесами, так и между ведущими осями.

Основное предназначение дифференциала заключается в распределении крутящего момента между колесами автомобиля и изменения их частоты вращении относительно друг друга. Так, например поворот автомобиля без дифференциала был бы попросту невозможен, так как при повороте внешнее колесо обязательно должно вращаться с большей частотой, нежели внутреннее. Дифференциалы существуют симметричные и несимметричные. Симметричный дифференциал передает равный крутящий момент на оба колеса и устанавливается чаще всего совместно с главной передачей. Несимметричный дифференциал позволяет передать крутящий момент в различных пропорциях и устанавливается между приводными осями автомобиля.
Дифференциал состоит из корпуса, шестерен сателлитов и полуосевых шестерен. Корпус обычно совмещен с ведомой шестерней главной передачи. Шестерни сателлиты играют роль планетарного редуктора и соединяют полуосевые шестерни с корпусом дифференциала. Полуосевые (солнечные) шестерни соединены с ведущими колесами посредством полуосей на шлицевых соединениях. При всех плюсах у простейшего дифференциала существует и недостаток. Дело в том, что частота вращения может быть распределена на колеса не только в соотношении, например 50/50, 40/60 или 35/65, но и 0/100. То есть, на одно колесо автомобиля может быть передан абсолютно весь крутящий момент, в то время как второе колесо будет абсолютно статично. Такое случается в том случае если автомобиль застрял в грязи или на льду.
При всех плюсах у простейшего дифференциала существует и недостаток. Дело в том, что частота вращения может быть распределена на колеса не только в соотношении, например 50/50, 40/60 или 35/65, но и 0/100. То есть, на одно колесо автомобиля может быть передан абсолютно весь крутящий момент, в то время как второе колесо будет абсолютно статично. Такое случается в том случае если автомобиль застрял в грязи или на льду.
Однако современные дифференциалы более совершенны и практически лишены данного недостатка. Многие дифференциалы имеют жесткую автоматическую или ручную блокировку. Кроме того современные легковые полноприводные автомобили снабжаются системой курсовой устойчивости, которая основана на оптимальном распределении крутящего момента между осями и отдельными колесами в зависимости от траектории движения.
Уважаемые посетители сайта!
Если Вы не нашли у нас то, что искали — не уходите сразу.
Обратите внимание на большой ассортимент предлагаемых товаров: электроинструмент, тепловое и насосное оборудование Quattro Elementi, расходные материалы Практика, автоинструмент Forsage, наборы инструмента KingTul (самые дешевые в РФ). А так-же компрессорное, сварочное оборудование, ручной инструмент и комплектующие. У нас есть товары для дачников и садоводов, для автолюбителей и фермеров, для ремонта или строительства.
А так-же компрессорное, сварочное оборудование, ручной инструмент и комплектующие. У нас есть товары для дачников и садоводов, для автолюбителей и фермеров, для ремонта или строительства.
Наш интернет-магазин предложит отличную цену в Санкт-Петербурге, и доставку в другие города. Для оптовых покупателей предоставляем отсрочку платежа, доставку товара и другие необходимые условия сотрудничества. Выберите на сайте что-то необходимое и мы будем рады продать Вам этот товар по отличной цене.
Самый полный привод — ДРАЙВ
Этот материал мы задумывали как типичный «ликбез» из серии «Всё, что вы хотели знать о полном приводе, но не знали, у кого спросить». Чем дифференциальный привод отличается от подключаемого с помощью вискомуфт или агрегатов типа Haldex, для чего нужны самоблокирующиеся дифференциалы… Но чем больше мы изучали историческую сторону вопроса, тем больше удивлялись. Оказывается, первый легковой автомобиль с постоянным полным приводом был сделан в Голландии ещё сто лет назад! А в 1935 году, например, полноприводный американский гоночный автомобиль чуть было не спас человечество от Второй мировой войны. ..
..
Зачем легковому автомобилю полный привод? Сейчас, в начале XXI века, этот вопрос кажется риторическим. Конечно же, для лучшей реализации тяговых сил двигателя. Для того чтобы колёса при разгоне на скользком покрытии как можно меньше буксовали вхолостую. Четыре ведущих колеса лучше, чем два! Но человечество долго постигало эту азбучную истину. Спросите любого автознатока — и он вам ответит, что эра полного привода на массовых легковых автомобилях началась только в 1980-м с появлением Audi Quattro. Назовёт он и редких предшественников — например, английский суперкар Jensen FF 1966 года и Subaru Leone 4WD 1972 года. Впрочем, настоящий знаток тут же оговорится: первые полноприводные автомобили Subaru не имели постоянного полного привода — он был подключаемым. А это, как говорят в Одессе, две большие разницы.
Паллиатив
Подключаемый привод на одну из пар колёс — решение на легковых автомобилях паллиативное. Такую трансмиссию в англоязычном мире часто называют Part-Time 4WD, «временный полный привод», и пришла она из мира внедорожников и грузовой техники повышенной проходимости.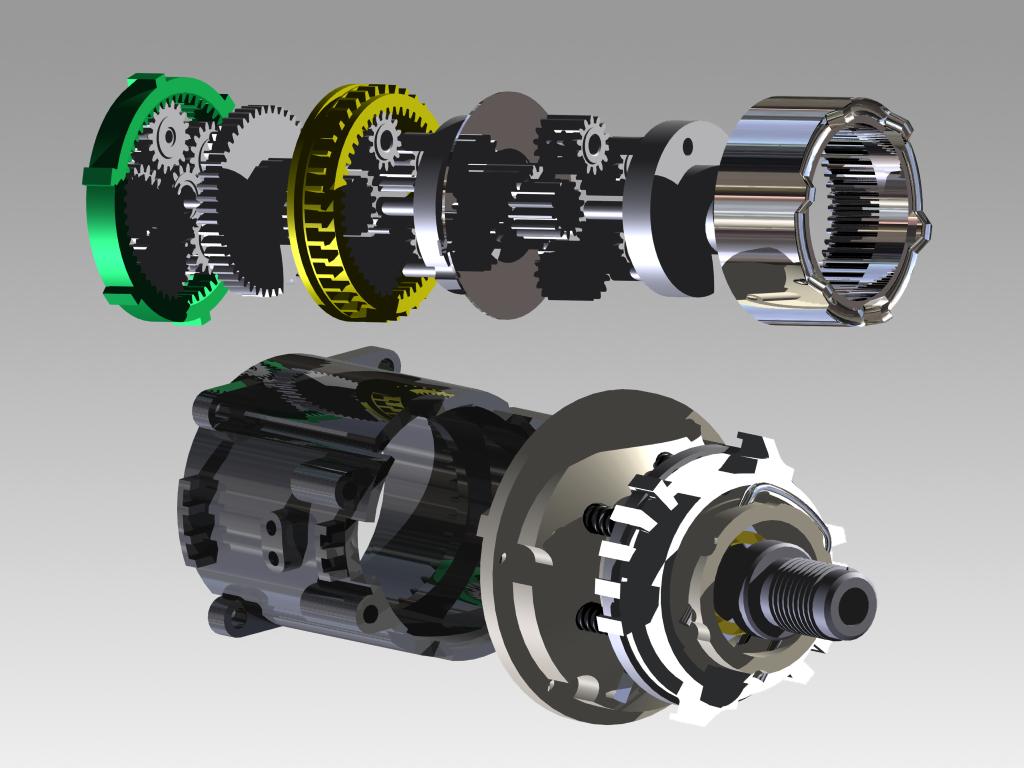 Такой автомобиль, у которого одна из осей постоянно ведущая, а другая жёстко подключается в случае необходимости, способен проявить свои полноприводные качества только на время преодоления бездорожья. А для движения по дорогам с твёрдым покрытием жёсткий полный привод приходится отключать. Почему? Причина — в так называемой циркуляции мощности. Ведь в повороте передние колёса проходят больший путь, двигаясь по дугам большего радиуса, а значит, и вращаются быстрее задних. Причём чем круче поворот, тем разница больше. И на автомобилях с таким типом привода тяга на передних колёсах падает, а на задних — наоборот, растёт. В некоторых случаях тяговый момент может смениться тормозным, то есть передние колёса будут увеличивать сопротивление движению автомобиля. Когда под колёсами грязь или снег, в этом нет ничего страшного — разве что автомобиль станет хуже слушаться руля и пойдёт наружу «плугом» с вывернутыми колёсами.
Такой автомобиль, у которого одна из осей постоянно ведущая, а другая жёстко подключается в случае необходимости, способен проявить свои полноприводные качества только на время преодоления бездорожья. А для движения по дорогам с твёрдым покрытием жёсткий полный привод приходится отключать. Почему? Причина — в так называемой циркуляции мощности. Ведь в повороте передние колёса проходят больший путь, двигаясь по дугам большего радиуса, а значит, и вращаются быстрее задних. Причём чем круче поворот, тем разница больше. И на автомобилях с таким типом привода тяга на передних колёсах падает, а на задних — наоборот, растёт. В некоторых случаях тяговый момент может смениться тормозным, то есть передние колёса будут увеличивать сопротивление движению автомобиля. Когда под колёсами грязь или снег, в этом нет ничего страшного — разве что автомобиль станет хуже слушаться руля и пойдёт наружу «плугом» с вывернутыми колёсами.
На этой схеме хорошо видно, что при движении в повороте все колёса катятся по своим траекториям и вынуждены вращаться с разными угловыми скоростями. Поэтому для постоянного полного привода нужны три дифференциала: два межколёсных и один межосевой.
Поэтому для постоянного полного привода нужны три дифференциала: два межколёсных и один межосевой.
Тем не менее блокированный полный привод на легковых дорожных автомобилях применяли. Правда, это были скорее легковушки повышенной проходимости. Например, в СССР ещё в 1938 году небольшими партиями начали выпускать ГАЗ-61 — полноприводную «эмку» с шестицилиндровым мотором и с подключаемым передним мостом. После войны делали и «внедорожный» вариант «Победы», ГАЗ-М72, и «Москвич»-410 с аналогичной трансмиссией… Да и Subaru Leone 4WD 1972 года, кстати, тоже делали для преодоления внедорожья — клиренс у машин с подключаемым задним мостом был выше, чем у обычных переднеприводных Subaru.
Subaru Leone 4WD Station Wagon (1972–1979) — полноприводная версия переднеприводной машины с подключаемым вручную приводом на задние колёса. Двигатель — объёмом 1,4 л (72 л.с.) или 1,6 л (80 л.с.). Кроме универсала, полным приводом оснащались седан и пикап. До 1989 года на всех полноприводных Subaru привод на задние колёса подключался или вручную (на машинах с механическими коробками), или автоматически — многодисковой фрикционной муфтой (на машинах с «автоматом»).
Итак, на дорогах с твёрдым покрытием, где легковые автомобили проводят большую часть времени, подключаемый привод бесполезен — он лишь утяжеляет автомобиль. Ведь всё это время машине приходится «возить с собой» раздаточную коробку, в которой происходит отбор мощности к «временно ведущей» второй оси, ещё один карданный вал, главную передачу второго моста…
Меж тем превратить «временный» полный привод в постоянный, Full-Time 4WD, очень просто. Нужно лишь добавить в раздаточную коробку межосевой дифференциал.
Постоянный полный
Зачем нужен межосевой дифференциал? Два межколёсных дифференциала, передний и задний, позволяют каждой паре колёс в поворотах вращаться с разными скоростями. А межосевой выполняет эту работу для обоих ведущих мостов. Поэтому автомобиль с тремя дифференциалами легко может двигаться с постоянным полным приводом по любым дорогам!
Элементарно? Меж тем до начала 80-х годов считалось, что постоянный полный привод дорожным автомобилям не нужен. Мол, к чему двигателю на сухом асфальте постоянно вращать вторую пару колёс и соответствующие детали трансмиссии — это и шум, и повышенный расход топлива… И лишь после появления Audi Quattro общественное мнение стало меняться в сторону постоянного полного привода. Ведь тяга двигателя при этом постоянно распределяется не на два, а на все четыре колеса, оставляя больший запас по сцеплению для восприятия боковых сил. И в повороте такой автомобиль оказывается намного более устойчивым при разгоне или при торможении двигателем.
Мол, к чему двигателю на сухом асфальте постоянно вращать вторую пару колёс и соответствующие детали трансмиссии — это и шум, и повышенный расход топлива… И лишь после появления Audi Quattro общественное мнение стало меняться в сторону постоянного полного привода. Ведь тяга двигателя при этом постоянно распределяется не на два, а на все четыре колеса, оставляя больший запас по сцеплению для восприятия боковых сил. И в повороте такой автомобиль оказывается намного более устойчивым при разгоне или при торможении двигателем.
«Рентген» Аudi 80 Quattro второй половины восьмидесятых годов. Хорошо видно, насколько проще и компактней схема quattro, чем трансмиссия Ferguson. Самоблокирующийся дифференциал Torsen используется Audi начиная с 1984 года. В отличие от дифференциала, блокируемого вискомуфтой, Torsen реагирует на изменение крутящего момента, реализуемого колёсами каждой из осей, повышает устойчивость при торможении и позволяет использовать АБС, так как блокируется только под тягой.
Кстати, первыми массовыми автомобилями с межосевыми дифференциалами в трансмиссии считаются Range Rover (1970) и наша «Нива» (1976). Но так как обе эти машины всё-таки принадлежат к внедорожному племени, то лавры первопроходца среди легковушек пожинает Audi Quattro.
А что же конструкторы гоночных автомобилей — неужели они не применили постоянный полный привод раньше? Мы знали, что попытки сделать полноприводные гоночные машины предпринимались и до эпохи Quattro. Например, первым послевоенным проектом Фердинанда Порше был полноприводный гоночный болид Cisitalia 360 среднемоторной компоновки с 12-цилиндровым полуторалитровым двигателем. Но доподлинно известно, что привод на передние колёса у этого чуда техники был отключаемым — гонщик должен был задействовать его только на прямых участках трассы, а перед поворотом вновь переходить на задний привод.
А были ли предшественники у Чизиталии? Оказалось, например, что тот же Фердинанд Порше ещё в 1900 году построил электромобиль с четырьмя ведущими мотор-колёсами. Но настоящий шок у автознатока вызовет гоночный автомобиль голландской фирмы Spyker образца 1902 года. В те дремучие времена, когда даже тормоза делали только на задних колёсах, у этого автомобиля был самый что ни на есть постоянный полный привод — с межосевым дифференциалом!
Но настоящий шок у автознатока вызовет гоночный автомобиль голландской фирмы Spyker образца 1902 года. В те дремучие времена, когда даже тормоза делали только на задних колёсах, у этого автомобиля был самый что ни на есть постоянный полный привод — с межосевым дифференциалом!
Голландскую фирму Spyker по выпуску конных экипажей основали в 1880 году братья Спяйкеры (по-фламандски фамилия пишется Spijker). В 1900 году братья выпустили первый автомобиль собственной конструкции, а спустя два года с помощью бельгийского конструктора Жозефа Лявиолета был разработан полноприводный гоночный Spyker 4WD (1902–1907) удивительно прогрессивной конструкции — с тремя дифференциалами! Тормозных механизмов было тоже три — два действовали на задние колёса, а ещё один тормоз был установлен на карданном валу к передним колёсам.
Так что можно смело заявлять, что нынче схема Full-Time 4WD справляет своё столетие… Полноприводных Спайкеров было выпущено немного — они стоили сумасшедших денег и по разным причинам не смогли добиться успеха в гонках. Не намного удачнее оказались и другие полноприводные гоночные автомобили — Bugatti Tipo 53 и Miller FWD начала 30-х годов. Что касается Bugatti, то инициатива принадлежала фиатовскому инженеру Антонио Пикетто, который в 1930 году предложил Этторе Бугатти построить гоночную машину с колёсной формулой 4×4. И в 1932 году были сделаны три полноприводных Bugatti Tipo 53 — с мощными компрессорными трёхсотсильными моторами, с постоянным полным приводом и с тремя дифференциалами.
Не намного удачнее оказались и другие полноприводные гоночные автомобили — Bugatti Tipo 53 и Miller FWD начала 30-х годов. Что касается Bugatti, то инициатива принадлежала фиатовскому инженеру Антонио Пикетто, который в 1930 году предложил Этторе Бугатти построить гоночную машину с колёсной формулой 4×4. И в 1932 году были сделаны три полноприводных Bugatti Tipo 53 — с мощными компрессорными трёхсотсильными моторами, с постоянным полным приводом и с тремя дифференциалами.
Полноприводный Bugatti Tipo 53 (1932–1935). Трансмиссия с тремя дифференциалами распределяла тягу 300-сильной компрессорной «восьмёрки» на все четыре колеса. Коробка передач, как обычно на Бугатти, стояла отдельно от двигателя, раздаточная коробка с межосевым дифференциалом составляла с ней одно целое. Приводные валы на передний и задний мосты проходили по левой стороне автомобиля, гонщик сидел справа. Несмотря на рекомендации конструктора переднеприводных машин того времени Альбера Грегуара, в приводе передних колёс Bugatti T53 были использованы не шарниры равных угловых скоростей типа Tracta, а обычные карданные сочленения. Кроме того, для Tipo 53 пришлось использовать нетипичную для Бугатти независимую переднюю подвеску на поперечной рессоре. Всё это привело к повышенным нагрузкам на руль — управлять автомобилем в поворотах было чрезвычайно тяжело, хотя скорости прохождения гравийных виражей были выше, чем у заднеприводных машин того времени. Всего было построено три Bugatti T53, которые выступали в разных гонках до 1935 года.
Кроме того, для Tipo 53 пришлось использовать нетипичную для Бугатти независимую переднюю подвеску на поперечной рессоре. Всё это привело к повышенным нагрузкам на руль — управлять автомобилем в поворотах было чрезвычайно тяжело, хотя скорости прохождения гравийных виражей были выше, чем у заднеприводных машин того времени. Всего было построено три Bugatti T53, которые выступали в разных гонках до 1935 года.
Интересно, что перед созданием полноприводного Bugatti итальянцы тщательно изучили приобретённый специально под разборку переднеприводный американский гоночный Miller. В свою очередь американец Гарри Миллер заинтересовался затеей Бугатти и тоже решил построить полноприводную версию своего автомобиля, заручившись спонсорством фирмы FWD (Four Wheel Drive — «Четыре ведущих колеса»), выпускавшей грузовики с колёсной формулой 4×4. Так появились полноприводные гоночные болиды Miller FWD.
Американский конструктор Гарри Миллер прославился в 20–30-х годах своими гоночными автомобилями для 500-мильных состязаний на треке в Индианаполисе, а его рядные «восьмёрки» с двумя верхними распредвалами брал за основу своих моторов Этторе Бугатти. Интересно, что Миллер строил машины как с передним, так и с задним приводом, а в 1932 году сделал несколько полноприводных шасси Miller FWD (на снимке) с тремя дифференциалами в трансмиссии. Один из полноприводных Миллеров лидировал в гонке Инди 500 1934 года, но из-за технических проблем финишировал девятым.
Интересно, что Миллер строил машины как с передним, так и с задним приводом, а в 1932 году сделал несколько полноприводных шасси Miller FWD (на снимке) с тремя дифференциалами в трансмиссии. Один из полноприводных Миллеров лидировал в гонке Инди 500 1934 года, но из-за технических проблем финишировал девятым.
Именно с этими машинами связан любопытный эпизод: во время гонки на берлинском треке Avus в 1935 году полноприводный Miller шёл третьим, когда его рядная «восьмёрка» не выдержала и буквально взорвалась. При этом куски мотора лишь немного не долетели до трибуны, на которой среди прочих важных персон из национал-социалистической партии сидел сам Гитлер! Право, редкий случай, когда об отсутствии человеческих жертв стоит пожалеть. Прилетел бы осколок поршня в голову одного человека — и ход мировой истории был бы совсем другим…
Но Bugatti Т53 и Miller FWD не получили должной оценки — подвели «сырая» конструкция и постоянные поломки. Зато следующий эпизод в истории легковых машин с постоянным полным приводом оказался воистину судьбоносным.
Формула Фергюсона
Чтобы оценить всю важность того, что происходило в Англии на рубеже 50–60-х годов, вернёмся к теории. Межосевой дифференциал создан для того, чтобы «развязать» обе ведущие оси. Например, задние колёса бешено буксуют, а передние стоят на месте. И дифференциал этому никак не препятствует!
Лекарство от этого недуга впервые придумали конструкторы внедорожников — это принудительная блокировка. В нужный момент водитель дёргает за рычаг, механизм намертво фиксирует шестерни межосевого дифференциала — и трансмиссия из дифференциальной, «свободной», становится жёстко замкнутой. Именно по этой схеме были сделаны и первые поколения автомобилей Range Rover, и наша «Нива», и множество других внедорожников. И, кстати, первые автомобили Audi Quattro тоже — в этих машинах до 1984 года водителю приходилось самостоятельно включать блокировку межосевого дифференциала.
Но это решение опять-таки паллиативное: блокировку на дорожной машине можно задействовать только на бездорожье. А на асфальте её нужно выключать. И если автомобиль внезапно попадёт на скользкий участок, колёса одной из осей при подаче тяги начнут буксовать раньше других.
А на асфальте её нужно выключать. И если автомобиль внезапно попадёт на скользкий участок, колёса одной из осей при подаче тяги начнут буксовать раньше других.
А можно ли сделать так, чтобы дифференциал при пробуксовке блокировался сам, автоматически? Внедрение самоблокирующегося межосевого дифференциала связано с именем англичанина Тони Ролта, гонщика и конструктора. Он и его друг Фред Диксон, тоже гонщик и страстный любитель повозиться с автомобильными железками, ещё до войны открыли собственное бюро Rolt/Dixon Developments по подготовке гоночных автомобилей. После войны два друга увлеклись идеей постоянного полного привода. Построив экспериментальную полноприводную «тележку» под названием «Краб», Ролт и Диксон в 1950 году перешли под крыло Гарри Фергюсона, преуспевающего тракторного фабриканта. Так возникла фирма Harry Ferguson Research.
Фергюсона мало интересовали гоночные болиды, зато он мечтал о безопасном дорожном автомобиле, колёса которого не буксовали бы при разгоне и не блокировались при торможении. И Ролт с Диксоном решили спроектировать такую машину «с нуля» — полностью, включая кузов, трансмиссию и силовой агрегат!
И Ролт с Диксоном решили спроектировать такую машину «с нуля» — полностью, включая кузов, трансмиссию и силовой агрегат!
Знаний друзьям не хватало, и на должность компетентного главного конструктора пригласили Клода Хилла, который ради столь интересной работы покинул Aston Martin. Но несмотря на финансы Фергюсона, работа шла неспешно — экспериментальный седан Ferguson R4 был готов только через шесть лет. Зато какой: полноприводный, с оппозитной «четвёркой», с дисковыми тормозами на всех колёсах и с электромеханической антиблокировочной системой Dunlop MaxaRet, позаимствованной из авиации!
Ferguson R4 (1956) — экспериментальный автомобиль с трансмиссией по Формуле Фергюсона. Вместо коробки передач у прототипа был гидротрансформатор.
Но самое интересное для нас заключалось внутри раздаточной коробки прототипа. Разобрав её, помимо дифференциала мы бы увидели ещё дополнительный «набор» шестерёнок, две шариковые обгонные муфты и два пакета фрикционов. Пока колёса не скользили, всё это хозяйство мирно вращалось вхолостую. Но когда начиналась пробуксовка колёс одной из осей и разность частот вращения выходных валов достигала определенной величины, одна из муфт срабатывала, сжимала «свой» пакет фрикционов — и те тормозили шестерни дифференциала, моментально блокируя его и превращая дифференциальный привод в жёсткий!
Пока колёса не скользили, всё это хозяйство мирно вращалось вхолостую. Но когда начиналась пробуксовка колёс одной из осей и разность частот вращения выходных валов достигала определенной величины, одна из муфт срабатывала, сжимала «свой» пакет фрикционов — и те тормозили шестерни дифференциала, моментально блокируя его и превращая дифференциальный привод в жёсткий!
Следующий прототип Ferguson R5 1962 года, на подготовку которого снова ушло шесть лет, оказался ещё интереснее — это был легковой полноприводный универсал. Эксперты журнала Autocar, которые позже испытывали Ferguson R5, делились впечатлениями: «Автомобиль достигает предела скольжений на невероятно высоких скоростях!»
Ferguson R5 был подготовлен к серийному производству в 1962 году.
Но никто из автомобилестроителей так и не взялся за выпуск первого в мире полноприводного универсала с межосевым самоблокирующимся дифференциалом и с АБС — слишком сложным и дорогим получился бы серийный Ferguson. Однако в 1962 году Ролту всё-таки удалось заинтересовать руководство компании Jensen — он предложил адаптировать полноприводную трансмиссию для купе Jensen CV8 с трёхсотсильным крайслеровским мотором V8, которое тогда готовили к серийному производству. Полный привод оказался мощному и скоростному купе как нельзя кстати!
Однако в 1962 году Ролту всё-таки удалось заинтересовать руководство компании Jensen — он предложил адаптировать полноприводную трансмиссию для купе Jensen CV8 с трёхсотсильным крайслеровским мотором V8, которое тогда готовили к серийному производству. Полный привод оказался мощному и скоростному купе как нельзя кстати!
Схема раздаточной коробки FFD с цилиндрическим несимметричным межосевым дифференциалом и механизмом автоматической блокировки с помощью фрикционных муфт экспериментального автомобиля Jensen CV8 FF. 1 — входной вал; 2 — промежуточный полый вал; 3 — полый вал с солнечной шестернёй дифференциала и ведущей шестернёй блокирующего механизма; 4 — водило межосевого дифференциала; 5 — вал привода задних колёс; 6 — цепной привод; 7 — вал привода передних колёс; 8 — многодисковая муфта, включающаяся при буксовании задних колёс; 9 — многодисковая муфта, включающаяся при буксовании передних колёс; 10 — электромагнитная система MaxaRet.
Через три года был построен экспериментальный полноприводный Jensen CV8 FF. А в 1966 году появилась следующая модель — Jensen Interceptor, с ещё более мощной 325-сильной «восьмёркой». Кроме заднеприводного купе предлагался и вариант со скромным шильдиком JFF. Это был знаменитый Jensen FF — первый в мире полноприводный серийный автомобиль с самоблокирующимся межосевым дифференциалом и с АБС! Буквы FF — это Formula Ferguson, обозначение запатентованной Ролтом и коллегами трансмиссии.
А в 1966 году появилась следующая модель — Jensen Interceptor, с ещё более мощной 325-сильной «восьмёркой». Кроме заднеприводного купе предлагался и вариант со скромным шильдиком JFF. Это был знаменитый Jensen FF — первый в мире полноприводный серийный автомобиль с самоблокирующимся межосевым дифференциалом и с АБС! Буквы FF — это Formula Ferguson, обозначение запатентованной Ролтом и коллегами трансмиссии.
Схема трансмиссии FFD в экспериментальном автомобиле Jensen CV8 FF 1965 года. Разместить узлы и агрегаты привода на передние колёса помогла особенность компоновки: двигатель находился за осью передних колёс, поэтому оказалось возможным расположить главную передачу переднего моста между мотором и радиатором. Карданный вал для привода передних колёс поместили слева от силового агрегата (машина с «правым рулём»). 1 — двигатель; 2 — автоматическая коробка передач; 3 — раздаточная коробка; 4 — АБС MaxaRet; 5 — главная передача заднего моста; 6 — главная передача переднего моста.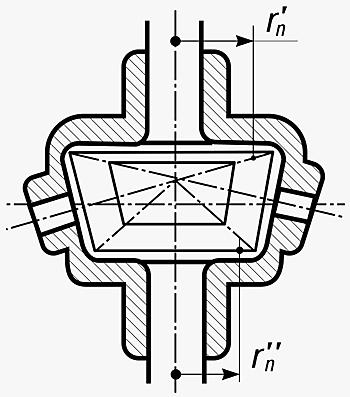
Все без исключения автомобильные журналисты того времени упоминали выдающуюся устойчивость полноприводных Дженсенов и «практически неограниченный запас тяги на мокром асфальте». Жаль, что самого Фергюсона к тому времени уже не было в живых — он умер в 1960-м…
Почему мы столь подробно рассказываем о Формуле Фергюсона? Да потому, что именно фирма Harry Ferguson Research впервые в мире уделила столь серьёзное внимание полному приводу как средству повышения активной безопасности!
Мы уже говорили, что привод на четыре колеса оставляет больший запас по сцеплению для восприятия боковых сил. И это плюс. Но есть и минус — теряется однозначность реакций на подачу топлива. Если на мощном заднеприводном автомобиле в скользком повороте резко нажать на газ, это вызовет занос задней оси. На переднеприводной машине, наоборот, при подаче тяги в скольжение сорвутся передние колёса. Хорошо это или плохо — не в том дело. Главное, что водитель всегда знает, как поведёт себя автомобиль в таком случае.
А какая ось сорвётся в скольжение на полноприводном автомобиле? На этот вопрос ответить непросто. Если в данный момент больше разгружен передок или под передними колёсами более скользкое покрытие, то начнётся снос. А если худшие условия по сцеплению имеют задние колёса, то машина уйдёт в занос. Реакция может быть неоднозначной! И это небезопасно.
Jensen FF (1966–1971) — полноприводная версия купе Jensen Interceptor. Первый серийный полноприводный автомобиль с самоблокирующимся межосевым дифференциалом. Двигатель Chrysler V8 с «большим блоком» рабочим объёмом 6,3 л развивал 325 л.с. и приводил все колёса через трёхступенчатый «автомат» TorqueFlite или 4-ступенчатую механическую коробку. На диагональных шинах размерностью 6,70–15 (как у «Волги» ГАЗ-21) Jensen FF снаряжённой массой 1800 кг развивал 212 км/ч и набирал 100 км/ч за 7,7 с. Другие технические особенности: реечный рулевой механизм с гидроусилителем, дисковые тормоза всех колёс, одноканальная АБС Dunlop MaxaRet (от английского maximum retardation — максимальное замедление), независимая передняя подвеска на двойных поперечных рычагах и зависимая рессорная с тягой Панара сзади. В 1968 году в Великобритании Jensen FF стоил 6000 фунтов стерлингов — примерно столько же, сколько самый дешёвый Rolls-Royсe. Всего было выпущено 318 полноприводных машин.
В 1968 году в Великобритании Jensen FF стоил 6000 фунтов стерлингов — примерно столько же, сколько самый дешёвый Rolls-Royсe. Всего было выпущено 318 полноприводных машин.
К счастью, Тони Ролт сам был гонщиком, причём очень хорошим — однажды, в начале 50-х, он даже выиграл 24-часовую гонку в Ле-Мане. Поэтому Ролт с коллегами с самого начала попытались избежать неоднозначности полного привода, применив несимметричный межосевой дифференциал. На задние колёса всех машин с фергюсоновскими трансмиссиями подавалось 63% крутящего момента, на передок — 37%. Таким образом реакция на увеличение тяги была приближена к заднеприводной.
Самоблокирующийся дифференциал позволил Дженсену взять лучшее от обоих типов трансмиссий. Лёгкий вход в поворот и отсутствие циркуляции мощности в штатных режимах движения без пробуксовки — от дифференциального привода. А лучшую реализацию тяги двигателя при пробуксовке — от жёсткого.
Но обгонные муфты механизма блокировки работали жёстко, в пульсирующем режиме, моментально превращая несимметричный дифференциальный привод в блокированный и обратно. Поэтому при пробуксовке неоднозначность увеличивалась! Был нужен механизм, который бы более гибко и плавно изменял степень блокировки межосевого дифференциала. И в конце 60-х годов Тони Ролт вместе с Дереком Гарднером, который позже был главным конструктором болидов Tyrrell, занялись странными, на первый взгляд, экспериментами с силиконовой жидкостью, что использовалась в муфтах привода вентиляторов радиаторов. Да-да, именно Ролт с Гарднером вошли в историю как изобретатели вискомуфты!
Поэтому при пробуксовке неоднозначность увеличивалась! Был нужен механизм, который бы более гибко и плавно изменял степень блокировки межосевого дифференциала. И в конце 60-х годов Тони Ролт вместе с Дереком Гарднером, который позже был главным конструктором болидов Tyrrell, занялись странными, на первый взгляд, экспериментами с силиконовой жидкостью, что использовалась в муфтах привода вентиляторов радиаторов. Да-да, именно Ролт с Гарднером вошли в историю как изобретатели вискомуфты!
Самоблокирующиеся развиваются
Цилиндр с пакетами фрикционов внутри, заполненный силиконовой жидкостью, отлично подходил для намеченной Ролтом цели — тормозить шестерни межосевого дифференциала при пробуксовке колёс. Пока скорости вращения всех колёс примерно равны, вискомуфта никак не вмешивается в работу межосевого дифференциала. Но вот колёса одной из осей забуксовали. Шестерёнки межосевого дифференциала тут же начинают раскручиваться, связанные с ним пакеты фрикционов вискомуфты «взбивают» силиконовую жидкость, и муфта «схватывается», блокируя межосевой дифференциал частично или полностью.
Такое устройство блокировало дифференциал плавнее и мягче, что положительно сказывалось на управляемости. После оформления патентов на вискомуфту Тони Ролт в 1971 году образовал фирму FF Developments — специально для того чтобы оснащать автомобили полноприводными трансмиссиями своей разработки. Например, среди первых заказов фирмы были полноприводные версии фургончиков Bedford для английских лесничеств, партия автомобилей Ford Zephyr FF для полиции или седаны Opel Senator 4×4 для британской военной миссии в Берлине. Но самым главным достижением FFD стала трансмиссия для американского автомобиля AMC Eagle, который выпускался с 1979 по 1988 год. Это был обычный легковой AMC Concord, но с поднятым на 75 мм кузовом и с увеличенными «внедорожными» шинами. И конечно же, с полноприводной трансмиссией. Причём впервые в мире серийный автомобиль был оснащён межосевым дифференциалом, блокирующимся вискомуфтой!
Конечно, создавался AMC Eagle главным образом для тех, кто периодически штурмует бездорожье, — полный привод появился на этих машинах не из-за желания добиться более уверенного разгона или лучшей устойчивости и управляемости, как в случае с суперкаром Jensen FF или с Audi Quattro. Но с трансмиссионной точки зрения прямыми наследниками AMC Eagle стали такие драйверские автомобили, как Subaru Impreza Turbo или Mitsubishi Lancer Evo с первого по шестое поколения. Ведь их межосевые дифференциалы тоже блокируются встроенными вискомуфтами.
Но с трансмиссионной точки зрения прямыми наследниками AMC Eagle стали такие драйверские автомобили, как Subaru Impreza Turbo или Mitsubishi Lancer Evo с первого по шестое поколения. Ведь их межосевые дифференциалы тоже блокируются встроенными вискомуфтами.
Раздаточная коробка автомобиля AMC Eagle разработки FFD. Обратите внимание на вискомуфту — это встроенный в межосевой дифференциал цилиндрический корпус с фрикционными дисками, заполненный вязкой кремнийорганической жидкостью (силоксан). При пробуксовке колёс одной из осей ведущий и ведомый пакеты дисков в вискомуфте проворачиваются относительно друг друга, давление и температура внутри возрастают, изменяется вязкость силоксана — и вискомуфта тормозит одну из выходных шестерён, не позволяя ей вращаться относительно корпуса и блокируя межосевой дифференциал.
Серийное купе Audi Quattro, которое появилось в 1981 году, через два года после дебюта AMC Eagle, оснащалось обычным «свободным» межосевым дифференциалом с принудительной блокировкой. Правда, Фердинанд Пьех, который в начале 80-х был начальником инженерного департамента Audi, выбрал для Quattro очень изящную схему, отлично подходившую для компоновки ингольштадтских машин. Продольно расположенный силовой агрегат переднеприводного автомобиля прямо-таки указывал торцом коробки передач на задние колёса — осталось лишь встроить в корпус трансмиссии межосевой дифференциал. Но для привода на передние колёса конструкторы Пьеха не стали городить традиционный для полноприводников огород с отдельной «раздаткой». Немцы сделали вторичный вал коробки полым — и сквозь него пропустили приводной вал передних колёс. Воистину, всё гениальное просто…
С самого начала на Audi, в отличие от FFD, выбрали симметричное распределение крутящего момента по осям — 50 : 50. А в 1984 году из салонов полноприводных Audi наконец-то исчезли архаичные ручки принудительной блокировки «центра» — в трансмиссиях Quattro появился привычный нам самоблокирующийся дифференциал Torsen. Название Torsen происходит от английских слов torque sensing и отражает способность этого чисто механического устройства мгновенно и плавно увеличивать степень своей блокировки в ответ на изменение крутящего момента на выходных валах. Поэтому Торсену не нужна вискомуфта — он блокируется сам. Причём срабатывает не от разности скоростей вращения уже после начала пробуксовки, а ещё до начала скольжения: Torsen способен реагировать на изменение сцепных условий в пятне контакта шин с дорогой!
Название Torsen происходит от английских слов torque sensing и отражает способность этого чисто механического устройства мгновенно и плавно увеличивать степень своей блокировки в ответ на изменение крутящего момента на выходных валах. Поэтому Торсену не нужна вискомуфта — он блокируется сам. Причём срабатывает не от разности скоростей вращения уже после начала пробуксовки, а ещё до начала скольжения: Torsen способен реагировать на изменение сцепных условий в пятне контакта шин с дорогой!
Кстати, когда в последнее время конструкторы больших внедорожников стали задумываться о достижении «легковой» управляемости, они тоже вспомнили про Torsen — он используется в трансмиссиях таких автомобилей, как новый Range Rover, VW Touareg/Porsche Cayenne и Toyota Land Cruiser Prado.
Но вернёмся в 80-е. Триумфальный выход Audi Quattro на раллийную сцену послужил началом полноприводного бума — все раллийные команды группы В бросились создавать версии 4×4. Один за другим появились Peugeot 205 T16, Metro 6R4, Lancia Delta S4, Ford RS200. .. Все как один — с вискомуфтами в самоблокирующихся дифференциалах разработки FFD. За работу с раллийными командами на FFD отвечал Стюарт Ролт, сын Тони…
.. Все как один — с вискомуфтами в самоблокирующихся дифференциалах разработки FFD. За работу с раллийными командами на FFD отвечал Стюарт Ролт, сын Тони…
В начале 90-х годов обращался к FFD и завод АЗЛК, когда было решено проектировать раллийную полноприводную модификацию «Москвича»-2141. С помощью англичан была создана трансмиссия с тремя самоблокирующимися дифференциалами — передним, задним и межосевым (точь-в-точь как на болидах Ford RS200). Управляемость экспериментальных полноприводных «Москвичей» в предельных режимах заслуживала самых лестных оценок — поведение машин в скольжении было предсказуемым и удобным для гонщиков. Оказалось, что, подбирая «жёсткость» блокирующих вискомуфт во всех трёх дифференциалах, можно в широком диапазоне настраивать управляемость автомобиля. Например, более «строгая» блокировка заднего межколёсного дифференциала повышает склонность автомобиля к заносу задней оси. Увеличение коэффициента блокировки переднего или межосевого дифференциала, наоборот, повышает запас устойчивости — автомобиль менее охотно заезжает в поворот из-за проскальзывания и сноса передних колёс.
Однако такая настройка актуальна только в одном случае — при раллийном стиле езды со скольжениями. Поэтому три самоблокирующихся дифференциала — это прерогатива болидов группы WRC. Причём на этих машинах, как правило, внутрь дифференциалов встроены уже не вискомуфты, а пакеты многодисковых фрикционов с гидроприводом и с электронным управлением. Таким образом конструкторы получают широчайшие возможности по настройке управляемости в режиме реального времени. Например, при входе в поворот бортовой компьютер может «распустить» муфты во всех трёх дифференциалах, превратив их в «свободные» — чтобы автомобиль легче заходил в вираж. А когда пилот начнёт ускоряться при выходе на прямую, электроника даст команду, и сервопривод «зажмёт» муфты в дифференциалах таким образом, чтобы добиться минимальной пробуксовки всех колёс и в то же время не перейти грань приемлемой недостаточной поворачиваемости, за которой болид вынесет наружу виража.
Кстати, первыми применили управляемые муфты в Daimler-Benz — в трансмиссии автомобиля Mercedes-Benz Е-класса 4Matic с кузовом W124 образца 1986 года.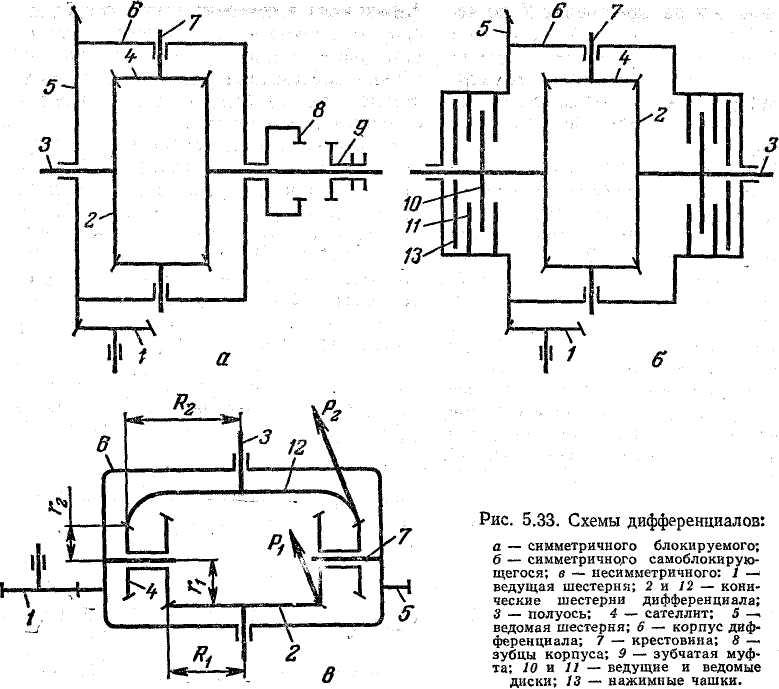 Причём муфт там было три — при необходимости электроника сперва подключала привод на передние колёса, а потом последовательно задействовала блокировки межосевого и заднего межколёсного дифференциалов. Но такая трансмиссия оказалась неоправданно сложной. Кроме того, на нестабильном покрытии электроника то подключала передние колёса, то отключала…
Причём муфт там было три — при необходимости электроника сперва подключала привод на передние колёса, а потом последовательно задействовала блокировки межосевого и заднего межколёсного дифференциалов. Но такая трансмиссия оказалась неоправданно сложной. Кроме того, на нестабильном покрытии электроника то подключала передние колёса, то отключала…
Ещё одним пионером применения электронноуправляемых муфт в скоростных автомобилях стала фирма Porsche — на модели Porsche 959 1986 года было две муфты, а электроника работала в четырёх режимах, которые мог выбирать водитель. Позже серийные автомобили с трансмиссиями подобной сложности начали выпускать японцы — это, например, Mitsubishi Lancer Evo, наиболее совершенный полноприводный дорожный автомобиль из всех, что когда-либо проходили испытания Авторевю. Эволюция с межосевым управляемым дифференциалом ACD и задним дифференциалом с активным распределением крутящего момента AYC способна творить чудеса…
Вместо дифференциала
Пока раллийные инженеры колдовали с механизмами самоблокировки, конструкторы массовых легковушек, наоборот, пошли по пути упрощения — и вообще отказались от межосевого дифференциала, заменив его вискомуфтой. Первым европейским легковым автомобилем с такой трансмиссией стал Volkswagen Golf II Syncro 1985 года — его трансмиссию разрабатывали инженеры фирмы GKN, которая ещё в 1969 году приобрела FFD. Преимуществами такой схемы были простота и унификация полноприводной модели с базовой. В нормальных условиях автомобиль сохранял характеристики и управляемость переднеприводного, а при пробуксовке передних колёс уже через 0,2 секунды срабатывала вискомуфта, способная подавать назад до 70% крутящего момента.
Первым европейским легковым автомобилем с такой трансмиссией стал Volkswagen Golf II Syncro 1985 года — его трансмиссию разрабатывали инженеры фирмы GKN, которая ещё в 1969 году приобрела FFD. Преимуществами такой схемы были простота и унификация полноприводной модели с базовой. В нормальных условиях автомобиль сохранял характеристики и управляемость переднеприводного, а при пробуксовке передних колёс уже через 0,2 секунды срабатывала вискомуфта, способная подавать назад до 70% крутящего момента.
Компоновка трансмиссии VW Golf III Syncro. «Раздатка» пристыкована к коробке передач, а вискомуфта установлена в блоке с главной передачей заднего моста и подключает привод на задние колёса при пробуксовке передних. На автомобилях VW Golf IV место вискомуфты заняла муфта Haldex.
Но такой «упрощенный» привод задних колёс обладал существенным недостатком — даже небольшая задержка в срабатывании вискомуфты усугубляла неоднозначность реакций. При подаче газа в скользком повороте автомобиль сначала сносило наружу, как переднеприводный, а потом, с подключением задних колёс, он резко менял характер — и мог уйти в занос.
Здесь отличились японцы — они неоднократно пытались сгладить этот недостаток, подбирая характеристики вискомуфт и используя их не только для включения привода на задние колёса, но и для блокировки межколёсных дифференциалов. На некоторых моделях (например Nissan Sunny/Pulsar 1988 года) было аж три вискомуфты: одна включала привод на задние колёса, а две другие служили для блокировки межколёсных дифференциалов. В автомобилях Ноnda Concerto 4WD вискомуфты заменяли не только межосевой, но и задний межколёсный дифференциал…
Но потом оказалось, что вместо вискомуфты в приводе задних колёс гораздо удобнее использовать просто фрикционную муфту, пакеты которой сжимаются гидроприводом. А управлять сжатием фрикционов и, соответственно, регулировать величину подаваемого к задним колёсам крутящего момента отлично может электроника.
Нынче большинство легковых полноприводников и паркетников имеют в приводе одной из осей управляемую муфту — будь то Haldex на автомобилях гольф-платформы концерна VW, система VTM-4 фирмы Honda или xDrive на BMW. Причём быстродействие современных муфт сделало задержку в подключении колёс практически незаметной — теперь всё зависит только от того, как настроена управляющая электроника. Например, трансмиссии автомобилей Golf 4Motion и Audi A3 Quattro совершенно идентичны конструктивно. Но разное программное обеспечение позволяет фольксвагеновцам выбирать симметричное распределение момента по осям, а инженеры Audi предпочитают подавать назад только 40% тяги, придавая своим машинам более переднеприводный характер. Дело вкуса…
Причём быстродействие современных муфт сделало задержку в подключении колёс практически незаметной — теперь всё зависит только от того, как настроена управляющая электроника. Например, трансмиссии автомобилей Golf 4Motion и Audi A3 Quattro совершенно идентичны конструктивно. Но разное программное обеспечение позволяет фольксвагеновцам выбирать симметричное распределение момента по осям, а инженеры Audi предпочитают подавать назад только 40% тяги, придавая своим машинам более переднеприводный характер. Дело вкуса…
А какие из этих схем предпочитаем мы? Легковые дорожные автомобили с подключаемым вручную приводом на вторую ось ныне, слава богу, не выпускаются. А что касается остальных трёх схем…
Конечно же, самые интересные, с нашей точки зрения, автомобили — это наследники Формулы Фергюсона, в трансмиссиях которых есть самоблокирующийся межосевой дифференциал. И неважно, какими путями осуществляется блокировка — вискомуфтой, как на автомобилях Subaru, механическим дифференциалом Torsen, как на моделях Audi A4-A6-A8 Quattro, VW Phaeton, или электронноуправляемыми муфтами (Mitsubishi Lancer Evo). Главное, что автоматически блокирующийся «центр» при грамотной настройке может значительно улучшить управляемость автомобиля — сделать его более безопасным и приятным для искушённого водителя.
Главное, что автоматически блокирующийся «центр» при грамотной настройке может значительно улучшить управляемость автомобиля — сделать его более безопасным и приятным для искушённого водителя.
Но машины с автоматически подключаемым приводом на задние колёса мы тоже не сбрасываем со счетов — их становится всё больше. Муфту Haldex в последнее время активно используют Volvo и Saab. Трансмиссии со «свободными» межосевыми дифференциалами тоже находят своё применение — причём на таких скоростных автомобилях, как Мерседесы 4Matic всех классов. Но на этих машинах вместе с дифференциальным полным приводом в обязательном порядке «работает» неотключаемая антипробуксовочная электроника, которая в какой-то мере компенсирует отсутствие механизма самоблокировки.
Но на этих машинах вместе с дифференциальным полным приводом в обязательном порядке «работает» неотключаемая антипробуксовочная электроника, которая в какой-то мере компенсирует отсутствие механизма самоблокировки.
Многодисковая муфта Haldex срабатывает от малейшего рассогласования скоростей вращения валов (1 и 5). Вращение любой из кулачковых шайб приводит к тому, что ролики начинают обкатываться по рабочим поверхностям (12) и перемещаться взад-вперёд, толкая поршни (10) в кольцевых цилиндрах насоса (на рисунке не показаны). Поршни накачивают масло в исполнительный цилиндр с поршнем (11), который и сжимает пакет дисков. Но электроника с помощью электромагнитного клапана может стравливать давление, тем самым гибко регулируя величину подводимого к колёсам момента. 1 — приводной вал; 2 — наружные фрикционные диски; 3 — внутренние фрикционные диски; 4 — уравновешивающая пружина; 5 — выходной вал; 6 — ступица; 7 — корпус; 8 — кулачковая шайба; 9 — ролики; 10 — кольцевые нагнетательные поршни; 11 — кольцевой рабочий поршень; 12 — профилированная рабочая поверхность.
Однако в последнее время мы замечаем, что по реальным ездовым свойствам автомобили с разными полноприводными трансмиссиями становятся все ближе друг к другу — естественно, при движении по дорогам общего пользования, а не на раллийных трассах. И чем более совершенными будут становиться электронные антипробуксовочные системы и программы управления муфтами типа Haldex, тем меньше будет различаться управляемость оснащённых ими автомобилей. Очевидно, это и есть прогресс.
Материал адаптирован к публикации с разрешения ООО «Газета «Авторевю». Все права на перепечатку принадлежат Авторевю.
Несимметричный дифференциал
Несимметричный дифференциал предназначен для использования в трансмиссиях колесных транспортных средств, имеет оси сателлитов, установленные с натягом в отверстиях на шестерне дифференциала, которые служат для точной фиксации положения водила на шестерне дифференциала и выполняют роль силовых элементов, вал привода заднего моста, установленный на зубьях в проточке коронной шестерни и зафиксированный стопорным кольцом, и ответные зубья муфты блокировки, выполненные на торце шестерни дифференциала. Предлагаемый несимметричный дифференциал имеет простую конструкцию, что ведет к упрощению технологии изготовления и удешевлению узла при сохранении потребительских свойств и надежности.
Предлагаемый несимметричный дифференциал имеет простую конструкцию, что ведет к упрощению технологии изготовления и удешевлению узла при сохранении потребительских свойств и надежности.
Полезная модель относится к транспортному машиностроению и может быть использована в трансмиссиях колесных транспортных средств.
Известен дифференциал раздаточной коробки, содержащий шестерню привода заднего моста, обойму дифференциала раздаточной коробки с сателлитами, ступицу шестерни низшей передачи. Дифференциал планетарного типа с четырьмя сателлитами, солнечным и коронным зубчатыми колесами, при этом коронное зубчатое колесо соединено с валом привода задних мостов. Момент вращения солнечного зубчатого колеса передается на вал привода переднего моста. При работающем (разблокированном) дифференциале обеспечивается постоянная и равномерная тяга всех мостов и устраняются дополнительные нагрузки в трансмиссии. В зависимости от дорожных условий дифференциал может быть выключен (заблокирован), и тогда валы привода переднего и задних мостов вращаются как одно целое (см.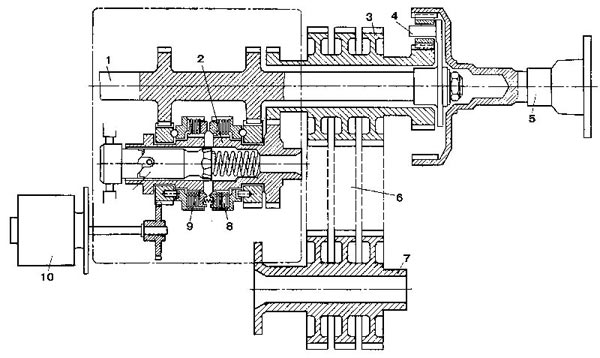 полезную модель 25717, МПК В60К 17/34, опубл. 15.04.2002).
полезную модель 25717, МПК В60К 17/34, опубл. 15.04.2002).
Наиболее близким к предлагаемому техническому решению по совокупности существенных признаков и достигаемому техническому результату является цилиндрический несимметричный дифференциал, содержащий коронную шестерню, выполненную за одно целое с валом привода заднего моста, водило дифференциала, с запрессованными в него осями, на которых на подшипниках установлены сателлиты. Для точной фиксации положения водила, закрепленного при помощи болтов на шестерне дифференциала, используются штифты, выполняющие роль силовых элементов. Крутящий момент через шестерню дифференциала передается на водило. При разблокированном дифференциале крутящий момент через сателлиты делится между передним и задним мостом. На заблокированном дифференциале крутящий момент передается через водило на валы переднего и заднего мостов (см. полезную модель 670277, МПК В60К 17/346, опубл. 10.10.2007).
Данный дифференциал раздаточной коробки выбран в качестве ближайшего аналога.
Недостатком известного устройства является сложность конструкции.
Задачей, на решение которой направлено заявляемое техническое решение, является упрощение конструкции несимметричного дифференциала.
Для решения поставленной задачи предложен цилиндрический несимметричный дифференциал, устанавливаемый на подшипниках, состоящий из вала привода переднего моста, муфты блокировки дифференциала, шестерни дифференциала, с закрепленным на нем, на четырех резьбовых элементах, водилом. Для точной фиксации положения водила на шестерне дифференциала используются оси сателлитов, запрессованные в отверстия на шестерне дифференциала и служащие силовыми элементами. Между шестерней дифференциала и водилом на осях сателлита и игольчатых подшипниках установлены четыре сателлита. Вал привода заднего моста установлен на зубьях в проточке коронной шестерни и зафиксирован стопорным кольцом.
В данном решении ответные зубья муфты блокировки выполнены непосредственно на шестерне дифференциала, а не на водиле, что упрощает конструкцию водила и исключает необходимость упрочнять отдельно торцевые зубья, так как шестерня полностью цементируется. В результате этого конструкция становится более технологичной, что ведет к удешевлению детали, а также уменьшает количество брака при изготовлении. В патентуемой конструкции только одна сложная в изготовлении деталь, а не две, как у прототипа. Оси сателлитов запрессованы в отверстия шестерни дифференциала и выполняют функцию силовых элементов, в результате отпадает необходимость в штифтах. Таким образом, в данной конструкции уменьшается количество деталей, что упрощает сборку дифференциала. В итоге конструкция получается более простой, компактной, надежной и технологичной.
Заявителю не известны раздаточные коробки с указанной совокупностью существенных признаков, и заявленная совокупность существенных признаков не вытекает явным образом из современного уровня техники, следовательно, заявляемое техническое решение соответствует условию патентоспособности «новизна».
Заявляемое техническое решение поясняется чертежом, на котором изображен несимметричный дифференциал раздаточной коробки.
Заявляемый несимметричный дифференциал раздаточной коробки, установленный на крышке 1 и картере 2 на подшипниках 3 и 4, содержит вал 5 привода переднего моста, муфту 6 блокировки дифференциала, установленную на шлицы вала 5, роликовый конический однорядный подшипник 7, шестерню 8 дифференциала, закрепленную четырьмя винтами 9 к водилу 10. В отверстиях шестерни дифференциала запрессованы оси 11 сателлитов. Вал привода 12 заднего моста установлен на зубьях и фиксируется стопорным кольцом 13 на проточке шестерни коронной 14 дифференциала. Дифференциал содержит четыре сателлита 15, вращающихся на подшипниках 16. С двух торцов сателлита установлены шайбы 17 опорные сателлита.
Предлагаемый несимметричный дифференциал имеет более простую конструкцию с меньшим количеством деталей, что ведет к упрощению технологии изготовления и удешевлению узла при сохранении потребительских свойств и надежности.
Предлагаемое техническое решение соответствует требованию промышленной применимости и возможно для реализации на стандартном технологическом оборудовании.
Несимметричный дифференциал, содержащий: крышку, картер, более одного сателлита, шестерню дифференциала, водило, закрепленное на шестерне дифференциала резьбовыми элементами, оси сателлитов, муфту блокировки дифференциала, вал-шестерню привода переднего моста и вал привода заднего моста, жестко соединенный с коронной шестерней дифференциала, отличающийся тем, что оси сателлитов установлены с натягом в отверстиях на шестерне дифференциала, вал привода заднего моста установлен на зубьях в проточке коронной шестерни и зафиксирован стопорным кольцом, а ответные зубья муфты блокировки выполнены на торце шестерни дифференциала.
Распределение крутящих моментов между осями несимметричного дифференциала
Распределение крутящих моментов между осями (3) [рис. 1, в)] несимметричного дифференциала осуществляется по следующей схеме. В дифференциале имеются двойные конические сателлиты (4). Через шестерню (2) они соединяются с его передней осью, а через шестерню (12) – с задней.
Рис. 1. Схемы дифференциалов.
а) – Схема симметричного блокируемого дифференциала;
б) – Схема симметричного самоблокирующегося дифференциала;
в) – Схема несимметричного дифференциала:
1) – Ведущая шестерня;
2) – Коническая шестерня дифференциала;
3) – Полуось;
4) – Сателлит;
5) – Ведомая шестерня;
6) – Корпус дифференциала;
7) – Крестовина;
8) – Зубцы корпуса;
9) – Зубчатая муфта;
10) – Ведущие диски;
11) – Ведомые диски;
12) – Коническая шестерня дифференциала;
13) – Нажимные чашки.
Из условия равновесия блока сателлитов относительно его оси P1r1=P1r1 либо
P2/P1=r1/r2
* где P1 и r1 – окружное усилие и радиус начальной скорости большего сателлита соответственно, P2 и r2 – то же меньшего сателлита.
Крутящие моменты Мдиф.1 и Мдиф.2, передаваемые передней и задней осям дифференциала соответственно
Мдиф.1=P1R1
Мдиф.2=P2R2
* где R1 и R2 – радиусы начальных окружностей осевых шестерён (2) и (12).
Разделив уравнение (Мдиф.2=P2R2) на уравнение (Мдиф.1=P1R1) с учётом уравнения (P2/P1=r1/r2), получаем
Мдиф.2/Мдиф.1=(r1/r2)•(R2/R1)=iд
* где iд – передаточное число дифференциала.
Мдиф.1+Мдиф.2=Мдиф
* где Мдиф – крутящий момент, подводимый к корпусу дифференциала.
Решая совместно уравнения (Мдиф.2/Мдиф.1=(r1/r2)•(R2/R1)=iд) и (Мдиф. 1+Мдиф.2=Мдиф), получаем
1+Мдиф.2=Мдиф), получаем
Мдиф.1=Мдиф/(1+iд)
Мдиф.2=Мдифiд/(1+iд)
Таким образом, распределение крутящих моментов между осями при несимметричном дифференциале зависит от значения передаточного числа дифференциала (iд). В частном случае, когда r1=r2 и R1=R2 (симметричный дифференциал), iд=1 и Мдиф.1=Мдиф.2.
Симметричный межосевой дифференциал используется в тех случаях, когда сцепные веса обоих ведущих осей одинаковы. В противном случае применяется дифференциал несимметричного типа.
17*
Похожие материалы:
Что такое межосевой дифференциал и для чего он нужен?
Дифференциал – устройство, управляющее распределением вращательного момента между входным и выходными валами. Хотя скорость отдельных элементов может разниться. Данный механизм успешно применяется в автомобилестроении и широко применим в нём. Различие дифференциалов проявляется в месте их установки, предназначению и конструктивным особенностям. Автомобили с приводом только на заднюю или переднюю ось оснащаются одним дифференциалом – межколёсным.
Хотя скорость отдельных элементов может разниться. Данный механизм успешно применяется в автомобилестроении и широко применим в нём. Различие дифференциалов проявляется в месте их установки, предназначению и конструктивным особенностям. Автомобили с приводом только на заднюю или переднюю ось оснащаются одним дифференциалом – межколёсным.
Необходимость в наличии дифференциала вызвана особенностями поведениями колёс в поворотах. Они проходят различное расстояние в эти моменты. Грузовые автомобили с приводами 6х6 и 8х8 оснащаются дополнительным межтележечным дифференциалом. В моделях с полным приводом устанавливаются три дифференциала: кроме двух межколёсных, ещё и один межосевой. О работе межосевого дифференциала, о его конструкции и предназначении мы и поговорим далее более подробно.
Конструкция межосевого дифференциала
Давайте рассмотрим конструкцию межосевого дифференциала на самом распространённом примере – коническом дифференциале. Конический дифференциал по своей конструкции схож с другими видами дифференциалов. Конический дифференциал – это планетарный редуктор с полуосевыми шестернями сателлитами, которые помещены в корпус. Корпус, или как его ещё называют «чашка дифференциала» принимает крутящий момент на себя от главной передачи и раздаёт его через сателлиты на шестерни полуосей. К корпусу жёстко прикреплена ведомая шестерня главной передачи. На внутренних осях корпуса вращаются сателлиты. Сателлиты выполняют роль планетарной шестерни. Они обеспечивают контакт корпуса с полуосевыми шестернями. В зависимости от того, какой величины передаётся крутящий момент, конструкция дифференциала насчитывает два или четыре сателлита.
Конический дифференциал по своей конструкции схож с другими видами дифференциалов. Конический дифференциал – это планетарный редуктор с полуосевыми шестернями сателлитами, которые помещены в корпус. Корпус, или как его ещё называют «чашка дифференциала» принимает крутящий момент на себя от главной передачи и раздаёт его через сателлиты на шестерни полуосей. К корпусу жёстко прикреплена ведомая шестерня главной передачи. На внутренних осях корпуса вращаются сателлиты. Сателлиты выполняют роль планетарной шестерни. Они обеспечивают контакт корпуса с полуосевыми шестернями. В зависимости от того, какой величины передаётся крутящий момент, конструкция дифференциала насчитывает два или четыре сателлита.
Дифференциалы легковых автомобилей, как правило насчитывают два сателлита. Полуосевые (солнечные) шестерни передают вращение на ведущие колёса через полуоси по шпицевому соединению. Правая и левая шестерни полуосей имеют как равное, так и различное число зубцов. Шестерни с равным количеством зубцов образуют симметричный дифференциал, в то время, когда неравное количество зубцов характерно для несимметричного дифференциала.
Шестерни с равным количеством зубцов образуют симметричный дифференциал, в то время, когда неравное количество зубцов характерно для несимметричного дифференциала.
Симметричный дифференциал распределяет вращение по осям в равных пропорциях, в независимости от того какой величины угловые скорости ведущих колёс. Благодаря своим свойствам симметричный дифференциал успешно применяется как межколёсный дифференциал. Несимметричный дифференциал разделяет крутящий момент в определённом соотношении, поэтому его устанавливают между осями полноприводного автомобиля.
Принцип работы межосевого дифференциала
Когда автомобиль движется по прямолинейной траектории по ровной дороге, расстояние, пройденное ведущими колёсами будет равным, так как у обоих колёс будет одинаковая угловая скорость. В процессе такого движения все сателлиты, шестерни и корпус дифференциала синхронизированы. Передачу крутящего момента данному механизму обеспечивает шестерня. Также отметим и тот факт, что при таком движении крутящий момент на каждом из ведомых колёс одинаков, а полуосевые шестерни заклиниваются сателлитами, которые статичны относительно своей оси.
Также отметим и тот факт, что при таком движении крутящий момент на каждом из ведомых колёс одинаков, а полуосевые шестерни заклиниваются сателлитами, которые статичны относительно своей оси.
Когда автомобиль входит в поворот, путь, который проходит колесо, идущее по внутреннему краю, меньший, чем у колеса на внешнем круге, следовательно и скорость вращения у них разная. Для стабилизации ситуации полуосевая шестерня замедляется, а сателлиты и корпус в это время упираются в полуосевую шестерню слева. Благодаря тому, что сателлиты вращаются вокруг своей оси, растёт и скорость, с которой вращается правая полуосевая шестерня. Это позволяет ведущим колёсам вращаться с разными скоростями, что предотвращает проскальзывание и пробуксовку. Отметим, что колесо с большей скоростью вращения получает меньший крутящий момент.
Давайте рассмотрим дифференциал с классической конструкцией. Основным его недостатком будет пробуксовка одного колеса, когда оно потеряет контакт с дорожной поверхностью. Всё дело в том, что колесо в подвешенном состоянии вращается примерно в два раза быстрее колеса, которое контактирует с дорогой при равном количестве оборотов ведомой шестерни дифференциала. Второе колесо остаётся статичным. Причиной всему является очень маленький крутящий момент, подведённый к нему, так как вращающееся подвешенное колесо получает незначительное сопротивление крутящего момента. Исходя из этого понятно, что крутящий момент противоположного колеса аналогично мал, поэтому оно и неподвижно.
Всё дело в том, что колесо в подвешенном состоянии вращается примерно в два раза быстрее колеса, которое контактирует с дорогой при равном количестве оборотов ведомой шестерни дифференциала. Второе колесо остаётся статичным. Причиной всему является очень маленький крутящий момент, подведённый к нему, так как вращающееся подвешенное колесо получает незначительное сопротивление крутящего момента. Исходя из этого понятно, что крутящий момент противоположного колеса аналогично мал, поэтому оно и неподвижно.
Если колесо пробуксовывает на повышенных оборотах в среде со значительным сопротивлением, крутящий момент, подаваемый на него будет большим в сравнении с проскальзывающим колесом, а следовательно и второму колесу будет предоставляться больший момент для осуществления вращения. Благодаря такому распределению автомобиль может медленно, но уверенно выбираться из ловушки. Буксующее колесо затрачивает много мощности, расходуемой на нагрев дорожного полотна, покрышек и т. д. Пробуксовка заметно снижает проходимость автомобиля с со свободным дифференциалом. Чтобы избежать подобных проблем, на автомобили устанавливают дифференциалы с возможностью их блокировки, как ручной, так и автоматической.
д. Пробуксовка заметно снижает проходимость автомобиля с со свободным дифференциалом. Чтобы избежать подобных проблем, на автомобили устанавливают дифференциалы с возможностью их блокировки, как ручной, так и автоматической.
Предназначение межосевого дифференциала
Как Вам уже стало понятно, предназначение межосевого дифференциала заключается в распределении крутящего момента между ведущими осями в полноприводных автомобилях, что даёт им возможность вращения с различными угловыми скоростями. Потребность в таком механизме возникла в следствии движения автомобилей по неровным поверхностям, когда масса самой конструкции давит на ось, что находится в гораздо низком положении. Так, если Вы едете под горку, то большая часть крутящего момента передаётся на заднюю ось. В случае спуска же всё происходит наоборот. Сам механизм межосевого дифференциала располагается, как правило, в раздаточной коробке транспортного средства.
По своему типу межосевой дифференциал может быть, как симметричным, так и несимметричным. Первый вариант дифференциалараспределяет крутящий момент в соотношении 50/50, когда второй в разных соотношениях, например, 60/40. Кроме того бывают межосевые дифференциалы, не имеющие блокировочного механизма, что не позволяет двигаться колёсам с разными скоростями. Есть самоблокирующиеся дифференциалы и с ручной блокировкой.
Второй вариант позволяет принудительно распределять крутящий момент между осями. Это хорошо помогает преодолевать различные дорожные преграды в виде грязи, песка или снега. Принудительное блокирование межосевого дифференциала может быть полным и частичным. При этом обеспечивается жёсткое соединение полуосей между собой. Зачастую для реализации всего внедорожного потенциала автомобиля применяется дифференциал с механизмом автоматической блокировки. Он имеет три вида конструкций и соответственно различные принципы функционирования.
Режимы работы межосевого дифференциала
Работа симметричного межосевого дифференциала разделяется на три, присущих ему, режима:
— прямолинейное движение;
— движение в повороте;
— движение по скользкой дороге.
При движении прямо, колёса принимают на себя равнораспределённое сопротивление дорожного полотна. Крутящий момент передаётся к корпусу дифференциала от главной передачи. Вместе с ним перемещаются и сателлиты. Сателлиты, обходя шестерни полуосей, передают на ведущие колёса весь крутящий момент в равных пропорциях. В отсутствии вращения сателлитов на осях, шестерни полуосей движутся с одинаковой угловой скоростью. Они вращаются с той же частотой, что и ведомая шестерня главной передачи.
При входе в поворот, ведущее колесо, идущее по внутреннему радиусу, принимает на себя большее сопротивление, чем колесо внешнего радиуса. Внутренняя полуосевая шестерня замедляет своё движение и побуждает вращаться сателлиты вокруг своей оси. Они в свою очередь, ускоряют вращение наружной шестерни полуоси. Колёса, движущиеся с разными угловыми скоростями позволяют проходить автомобилю поворот без излишней пробуксовки. Сумма частот вращения полуосевых шестерен внутри и снаружи равна частоте вращения ведомой шестерни, умноженной на двое. Крутящий момент распределяется между ведущими колёсами в равной степени. И на это не влияет разность угловых скоростей.
Крутящий момент распределяется между ведущими колёсами в равной степени. И на это не влияет разность угловых скоростей.
Когда автомобиль движется по скользкой дороге, одно колесо принимает на себя большую часть сопротивления, в то время как второе пробуксовывает или проскальзывает. Дифференциал заставляет вращаться «проблемное» колесо с большей скоростью. Второе колесо вынуждено остановиться. Сила тяги, образуемая на буксующем колесе очень мала в силу низкого сцепления, поэтому его вращение тоже происходит с небольшой скоростью. А в силу конструкции симметричного дифференциала, другое колесо будет обладать теми же характеристиками на тот момент. Ситуация зашла в тупик – автомобиль не сдвигается с места. Решить эту проблему можно увеличив крутящий момент на небуксующем колесе. Это легко осуществляется блокировкой дифференциала.
Подписывайтесь на наши ленты в таких социальных сетях как,
Facebook,
Вконтакте,
Instagram,
Pinterest,
Yandex Zen,
Twitter и
Telegram:
все самые интересные автомобильные события собранные в одном месте.
Как работает дифференциал — видео работы
Продолжаем нашу тему конструкции автомобиля и рассмотрим элемент трансмиссии, такой как дифференциал. Зачем он нужен, где применяется и т.д. А в следующей статье рассмотрим как работает дифференциал и посмотрим видео его работы.
Если разъяснить простыми словами, то данный элемент служит основным распределителем крутящего момента на элементы потребления, будь то карданы или полуоси. Также он создает разную скорость вращения потребителей, что повышает ресурс отдельных узлов автомобиля.
Где располагается дифференциал:
- Задний привод – картер заднего моста;
- Передний привод – коробка переключения передач;
- Полный привод – в картерах переднего и заднего моста, а также в раздаточной коробке.
Те дифференциалы, которые используются для привода колес (в картере моста), называют межколесным дифференциалом.
Дифференциал, который устанавливается между двумя ведущими мостами (раздаточная коробка), называют межосевым.
Конструктивно дифференциал выполнен на основе планетарного редуктора. И он также разделяется на типы, в зависимости от используемой зубчатой передачи:
- Конический
- Червячный
- Цилиндрический
- Конический дифференциал. Данный тип дифференциала применяется, как правило, в редукторах мостов (межколесный). Пожалуй самый распространенный тип.
- Цилиндрический дифференциал. Менее популярный тип, но все же используется некоторыми производителями автомобилей. Чаще всего устанавливается между осями автомобиля.
- Червячный дифференциал. Ну, это наиболее популярный и универсальный тип. Используется во всех вышесказанных случаях.
Устройство дифференциала
Рассмотрим устройство данного узла по примеру конического дифференциала – это не так важно, ведь основные части у всех одинаковы, с некоторыми отличиями.
В состав конического дифференциала входит сам редуктор и сателлиты. Эти элементы входят в корпус.
Этот корпус принимает на себя крутящий момент, далее передает его на шестерни полуосей через сателлиты. Внутри корпуса размещены специальные оси, на которых вращаются сателлиты. Главная передача крепится непосредственно к корпусу дифференциала.
Внутри корпуса размещены специальные оси, на которых вращаются сателлиты. Главная передача крепится непосредственно к корпусу дифференциала.
Также есть отличия по количеству применения сателлитов. Как правило, на легковых автомобилях их всего два, но при большом крутящем моменте устанавливают четыре. Полноприводные и грузовые автомобили, чаще всего имеют по четыре сателлита в дифференциале.
По количеству шестерен полуосей, различают два типа дифференциала – симметричный и несимметричный.
Симметричный дифференциал – левая и правая шестерня имеют одинаковое количество зубьев и весь крутящий момент распределяется равнозначно на обе полуоси. Такой тип используют в картерах мостов.
Несимметричный дифференциал – левая и правая шестерня имеют различное количество зубьев и крутящий момент соответственно передается в различных соотношениях. По этой причине данный тип дифференциала используют, как межосевой.
Как работает дифференциал видео
youtube.com/embed/WGWZkceHU1Q?feature=oembed» frameborder=»0″ allowfullscreen=»»/>
Так мы быстро и просто разобрали виды дифференциалов и узнали, как работает дифференциал + посмотрели видео о нем.
Дифференциальная емкость двойного электрического слоя — влияние асимметричного размера ионов, толщины кормового слоя и ориентационное упорядочение диполей воды | Иглич
Дифференциальная емкость двойного электрического слоя — влияние асимметричного размера ионов, толщины кормового слоя и ориентационное упорядочение диполей воды
Алеш Иглич, Екатерина Гонгадзе, Вероника Краль-Иглич
Абстрактные
Теоретическая модель среднего поля двойного электрического слоя, которая учитывает асимметричный конечный размер анионов и катионов и ориентационное упорядочение диполей воды в Штерновом и диффузном слоях, описывается вместе с кратким описанием основных концепций. и краткий обзор литературы по теории двойного электрического слоя. В качестве примера применения описанной модели решетки среднего поля двойного электрического слоя показано влияние различных размеров анионов и катионов, влияние толщины слоя Штерна и влияние ориентационного упорядочения молекул воды на Теоретически рассматривается асимметричная бимодальная верблюжья зависимость дифференциальной емкости от поверхностного потенциала.
В качестве примера применения описанной модели решетки среднего поля двойного электрического слоя показано влияние различных размеров анионов и катионов, влияние толщины слоя Штерна и влияние ориентационного упорядочения молекул воды на Теоретически рассматривается асимметричная бимодальная верблюжья зависимость дифференциальной емкости от поверхностного потенциала.
Представленная теоретическая модель двойного электрического слоя достаточно гибкая, чтобы в будущем ее можно было распространить на более сложные многокомпонентные системы с молекулами разного размера и ориентационным упорядочением молекул.
Ключевые слова
Асимметричный размер ионов; относительная диэлектрическая проницаемость; заказ воды; Кормовой слой; дифференциальная емкость
DOI: http://dx.doi.org/10.17344/acsi.2019.5495
Рефбэков
- На данный момент рефбеков нет.
Copyright (c) 2019 Алеш Иглич, Екатерина Гонгадзе, Вероника Краль-Иглич
Эта работа находится под лицензией Creative Commons Attribution 4.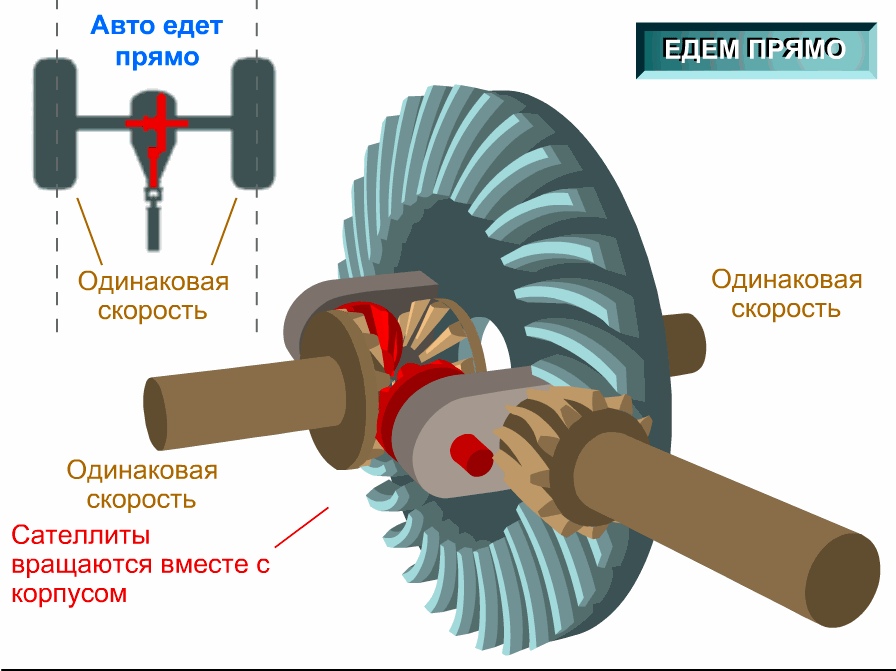 0 Международная лицензия.
0 Международная лицензия.
Произошла ошибка при настройке пользовательского cookie
Произошла ошибка при настройке пользовательского cookieЭтот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера на прием файлов cookie
Есть много причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie.Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались. Чтобы принять файлы cookie с этого сайта, используйте кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie.Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie. Вы должны отключить приложение при входе в систему или уточнить у системного администратора.
 Если вы подозреваете это, попробуйте другой браузер.
Если вы подозреваете это, попробуйте другой браузер.Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу.Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файлах cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта.Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
Асимметричный наножидкостный решетчатый детектор для дифференциального измерения показателя преломления и биочувствительности
Измерение небольших изменений показателя преломления может предоставить как чувствительную, так и бесконтактную информацию о концентрации молекул или условиях процесса для широкого диапазона приложений.Однако измерения показателя преломления легко нарушаются неспецифическими фоновыми сигналами, такими как изменения температуры или неспецифическое связывание. Здесь мы представляем оптофлюидное устройство для измерения показателя преломления с прямым вычитанием фона в рамках одного измерения. Устройство состоит из двух встречно-штыревых массивов наножидкостных каналов, образующих оптическую решетку. Разность оптических путей между двумя наборами каналов может быть измерена напрямую через — отношение интенсивностей в дифракционной картине, которая формируется, когда решетка освещается коллимированным лазерным лучом.Наши результаты показывают, что калибровка или смещение не требуется, если элементарная ячейка решетки спроектирована с соответствующей встроенной асимметрией. В экспериментальных экспериментах мы достигли уровня шума, эквивалентного ∼10 −5 единиц показателя преломления (частота дискретизации 30 Гц, интервал измерения 4 мин). Кроме того, мы показываем, что накопление биомолекул на поверхности наноканалов может быть измерено в режиме реального времени. Мы ожидаем, что благодаря своей простоте и надежности эта по своей сути концепция дифференциальных измерений найдет множество применений в аналитических системах сверхмалого объема, биосенсорах и портативных устройствах.
Здесь мы представляем оптофлюидное устройство для измерения показателя преломления с прямым вычитанием фона в рамках одного измерения. Устройство состоит из двух встречно-штыревых массивов наножидкостных каналов, образующих оптическую решетку. Разность оптических путей между двумя наборами каналов может быть измерена напрямую через — отношение интенсивностей в дифракционной картине, которая формируется, когда решетка освещается коллимированным лазерным лучом.Наши результаты показывают, что калибровка или смещение не требуется, если элементарная ячейка решетки спроектирована с соответствующей встроенной асимметрией. В экспериментальных экспериментах мы достигли уровня шума, эквивалентного ∼10 −5 единиц показателя преломления (частота дискретизации 30 Гц, интервал измерения 4 мин). Кроме того, мы показываем, что накопление биомолекул на поверхности наноканалов может быть измерено в режиме реального времени. Мы ожидаем, что благодаря своей простоте и надежности эта по своей сути концепция дифференциальных измерений найдет множество применений в аналитических системах сверхмалого объема, биосенсорах и портативных устройствах.
Эта статья в открытом доступе
Подождите, пока мы загрузим ваш контент… Что-то пошло не так. Попробуйте еще раз?Многоплоскостная дифференциальная фазово-контрастная визуализация с использованием асимметричного освещения в объемной голографической микроскопии
1.

Введение
В последнее время интерес к методам фазовой визуализации возобновился в основном благодаря достижениям в методах компьютерной визуализации. 1 Прозрачные образцы имеют слабые фазовые особенности, которые трудно уловить с помощью большинства обычных микроскопов. 2 Для наблюдения за фазовыми объектами были разработаны различные методы визуализации; среди них выделяются метод Шлирена и метод центрального темного фона. 3 Для метода Шлирена требуется объект с острым краем в плоскости Фурье для формирования фазового изображения, которое трудно выровнять в правильной плоскости Фурье, и воспроизводимость результатов является важной проблемой. 4 В методе центрального темного заземления используется кольцевая апертура, чтобы блокировать постоянный ток света, что приводит к значительной потере интенсивности изображения. 5 Чтобы преодолеть эти проблемы, был предложен метод дифференциального фазового контраста (DPC). Метод Шлирена и метод центральной темной земли ограничены одним и тем же недостатком: наблюдаемые изменения интенсивности не связаны линейно с фазовым сдвигом, создаваемым объектом. Предыдущие исследования фазовой визуализации показывают, что DPC работает лучше, чем вышеупомянутые методы.Вышеупомянутый метод не может обеспечить мультиглубокие изображения фазового контраста. С другой стороны, фазово-контрастная микроскопия — это хорошо зарекомендовавший себя метод, который регулярно используется для получения контраста изображения для обнаружения внутренних структурных деталей прозрачных объектов без какой-либо флуоресцентной маркировки. 1 DPC — это один из методов повышения контрастности, который имеет множество преимуществ перед своими аналогами. Различные оптические системы были разработаны для получения изображений DPC с помощью обычных широкопольных микроскопов. 6 , 7 Метод DPC может предоставить объемную фазовую информацию объекта.
Метод Шлирена и метод центральной темной земли ограничены одним и тем же недостатком: наблюдаемые изменения интенсивности не связаны линейно с фазовым сдвигом, создаваемым объектом. Предыдущие исследования фазовой визуализации показывают, что DPC работает лучше, чем вышеупомянутые методы.Вышеупомянутый метод не может обеспечить мультиглубокие изображения фазового контраста. С другой стороны, фазово-контрастная микроскопия — это хорошо зарекомендовавший себя метод, который регулярно используется для получения контраста изображения для обнаружения внутренних структурных деталей прозрачных объектов без какой-либо флуоресцентной маркировки. 1 DPC — это один из методов повышения контрастности, который имеет множество преимуществ перед своими аналогами. Различные оптические системы были разработаны для получения изображений DPC с помощью обычных широкопольных микроскопов. 6 , 7 Метод DPC может предоставить объемную фазовую информацию объекта.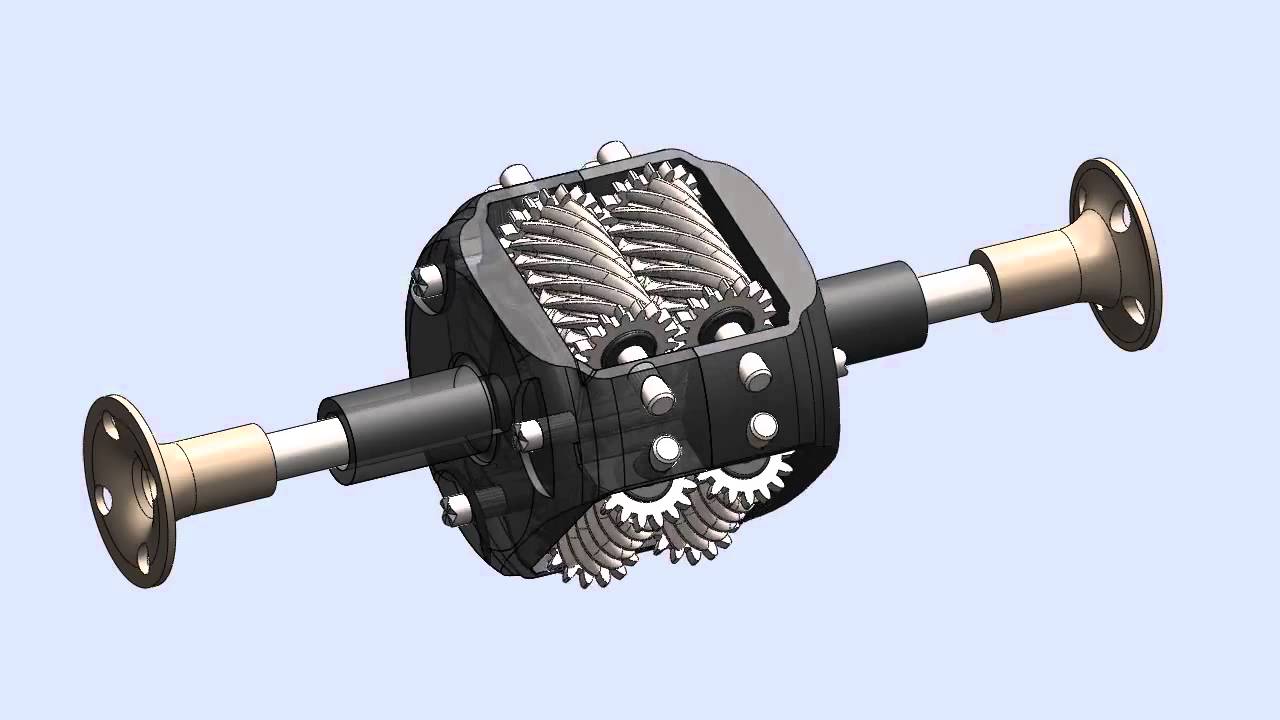 После использования 4-х полукруглых асимметричных источников света для захвата многоглубинных изображений слабого объекта метод использует метод на основе глобального быстрого преобразования Фурье для получения трехмерных фазовых изображений. Однако методы 3D DPC не могут получать изображения мультифокусных плоскостей без осевого сканирования. Кроме того, методы DPC также использовались для количественной фазовой визуализации.Для количественного измерения фазы для различных биологических образцов использовались различные виды схем освещения с использованием методов проектирования функции зрачка и восстановления фазы. 8 — 10 Однако методы 3D DPC не могут получать изображения мультифокусных плоскостей без осевого сканирования, для этого по-прежнему требуется механический или оптический механизм сканирования. Получение точных многоглубинных изображений DPC с помощью широкопольного микроскопа — нетривиальная задача. Тем не менее, большинство систем многомерной визуализации требуют механического или электрооптического механизма осевого сканирования для создания изображений с разной глубиной.
После использования 4-х полукруглых асимметричных источников света для захвата многоглубинных изображений слабого объекта метод использует метод на основе глобального быстрого преобразования Фурье для получения трехмерных фазовых изображений. Однако методы 3D DPC не могут получать изображения мультифокусных плоскостей без осевого сканирования. Кроме того, методы DPC также использовались для количественной фазовой визуализации.Для количественного измерения фазы для различных биологических образцов использовались различные виды схем освещения с использованием методов проектирования функции зрачка и восстановления фазы. 8 — 10 Однако методы 3D DPC не могут получать изображения мультифокусных плоскостей без осевого сканирования, для этого по-прежнему требуется механический или оптический механизм сканирования. Получение точных многоглубинных изображений DPC с помощью широкопольного микроскопа — нетривиальная задача. Тем не менее, большинство систем многомерной визуализации требуют механического или электрооптического механизма осевого сканирования для создания изображений с разной глубиной.
В последние десятилетия были разработаны объемные голографические системы для создания многомерных изображений. Основная идея в системах формирования голографических изображений различного объема заключается в снижении требований к осевому сканированию и прямом получении изображений с разной глубиной. 11 Как правило, объемный голографический микроскоп состоит из системы формирования изображений 4-f с мультиплексированными объемными голографическими решетками в плоскости Фурье для одновременного наблюдения многоглубинных изображений образца. Кроме того, было продемонстрировано, что объемная голографическая микроскопия (VHM) хорошо работает как с когерентными, так и с некогерентными источниками света. 11 — 14 Хотя методы фазового контраста VHM были предложены в прошлом для улучшения фазовой информации объектов, все еще существуют большие возможности для улучшения их функциональности. В основном существуют два метода VHM для получения фазового контраста, в которых либо в формировании изображения, либо в системе записи используется острая компонента. 12 , 13 В прежнем методе используется острый фильтр в сопряженной плоскости зрачка объемной голограммы для блокировки компонентов половинной пространственной частоты в плоскости Фурье для получения фазово-контрастного изображения.В последнем методе во время процесса записи перед объемной голограммой необходимо установить острый фильтр. Во время формирования изображения эти решетки усиливают информацию о высокочастотной пространственной частоте спектра Фурье для создания фазово-контрастных изображений.
В этой статье мы предлагаем и экспериментально демонстрируем метод визуализации DPC в VHM с использованием асимметричного освещения. Мы представляем две новые конфигурации для систем DPC-VHM. В отличие от ранее упомянутых систем объемного голографического микроскопа, которые используют равномерное освещение объекта и, следовательно, не могут предоставить изображения DPC, 12 , 13 наша система использует специально разработанные асимметричные шаблоны освещения для получения изображений DPC. 15 В первой конфигурации попарно чередующаяся черная и белая полукруглая маска амплитуды напрямую помогает в выполнении операции DPC, тогда как во второй конфигурации DPC достигается с помощью двухцветной (красно-синей) маски амплитуды в качестве асимметричного освещения . В обеих конфигурациях панель тонкопленочных транзисторов (TFT-панель) может динамически управляться для создания различных амплитудных шаблонов для асимметричного освещения. В ограничивающих условиях, просто отображая полный белый узор, настоящая система может также работать как светлопольный объемный голографический микроскоп. 11
15 В первой конфигурации попарно чередующаяся черная и белая полукруглая маска амплитуды напрямую помогает в выполнении операции DPC, тогда как во второй конфигурации DPC достигается с помощью двухцветной (красно-синей) маски амплитуды в качестве асимметричного освещения . В обеих конфигурациях панель тонкопленочных транзисторов (TFT-панель) может динамически управляться для создания различных амплитудных шаблонов для асимметричного освещения. В ограничивающих условиях, просто отображая полный белый узор, настоящая система может также работать как светлопольный объемный голографический микроскоп. 11
2.
Методы
2.1.
Дифференциальный фазовый контраст
В наших системах визуализации изображения DPC получают методом, предложенным Деккерсом и де Лангом. 16 , 17 Комплексный коэффициент пропускания образца можно записать как
Eq. (1)
t (x) = a (x) exp jϕ (x).Если пара изображений с асимметричным освещением складывается вместе, то информация об амплитуде может быть получена как
Eq.
 (2) I + (x) = I1,1 + I1,2 = a2 (x), а если их вычесть, они дают дифференциал фазы, модулированный α2 (x)
(2) I + (x) = I1,1 + I1,2 = a2 (x), а если их вычесть, они дают дифференциал фазы, модулированный α2 (x)Eq. (3)
I− (x) = I1,1 − I1,2 = a2 (x) dϕdx.По формулам. (2) и (3), дифференциал фазы может быть получен как
Eq. (4)
dϕdx = I− (x) I + (x).Разность фаз чувствительна к изменениям фазы, что приводит к усилению контраста высоких пространственных частот, а также к подавлению низких частот.
Здесь мы следуем методу DPC, основанному на асимметричном освещении. 16 , 17 Черно-белый узор полукруга для асимметричного освещения в плоскости Фурье может быть выражен как
Eq. (5)
h2,1 = 12 [1 + sign (fx)],Ур. (6)
h2,2 = 12 [1 + sign (fx)], где h2 и h3 — передаточная функция правой и левой окружностей, соответственно, fx — координата на плоскости Фурье вдоль оси x direction, а sgn — знаковая функция. 12 Комплексный коэффициент пропускания образца слабой фазы в одном направлении (x) может быть выражен какEq.
 (7) t (x) = exp jϕ (x) = 1 + jϕ (x), где ϕ (x) — фаза образца в направлении x. Изображения образца слабой фазы, полученные при асимметричном освещении, могут быть получены как
(7) t (x) = exp jϕ (x) = 1 + jϕ (x), где ϕ (x) — фаза образца в направлении x. Изображения образца слабой фазы, полученные при асимметричном освещении, могут быть получены какEq. (8)
I1,1 = | t (x) * FT [h2] | 2 = | [1 + jϕ (x)] * FT [1 + sgn (fx) 2] | 2 = 1 + 2 (ϕ ( x) * 1πx) + ϕ (x) 2+ (ϕ (x) * 1πx) 2,Ур. (9)
I1,2 = | t (x) * FT [h3] | 2 = | [1 + jϕ (x)] * 12 [δ (x) −1jπx] | 2 = 1−2 (ϕ (x ) * 1πx) + ϕ (x) 2− (ϕ (x) * 1πx) 2, где I1,1 и I1,2 — наблюдаемые изображения, захваченные освещением правого и левого полукругов, соответственно, а FT означает Преобразование Фурье, а * представляет операцию свертки.Если изображения попарного асимметричного освещения (I1,1 и I1,2) складываются вместе, то окончательное изображение может быть получено какEq. (10)
I + = I1,1 + I1,2 = 2 (1 + ϕ (x) 2), где ϕ (x) мало и для простоты им можно пренебречь, поэтому I + можно рассматривать как постоянное значение . В то время как если вычесть попарные изображения с асимметричным освещением, то окончательное изображение может быть получено какEq.
 (11) I− = I1,1 − I1,2 = 4 (ϕ (x) * 1πx) +2 (ϕ (x) * 1πx) 2.
(11) I− = I1,1 − I1,2 = 4 (ϕ (x) * 1πx) +2 (ϕ (x) * 1πx) 2.Затем, если мы сделаем два вышеупомянутых уравнения, чтобы разделить друг друга, мы можем получить
Eq.(12)
I − I + = 2 (ϕ (x) * 1πx) + (ϕ (x) * 1πx) 2 (1 + ϕ (x) 2) α (ϕ (x) * 1πx), где (ϕ ( x) * 1πx) — преобразование Гильберта функции ϕ (x). Согласно свойству преобразования Гильберта, наш DPC-VHM может подавлять низкочастотную составляющую постоянного тока и усиливать высокочастотную составляющую с огромным изменением фазы.2.2.
AMVHG на основе DPC-VHM
Первая конфигурация DPC-VHM состоит из двух основных частей, асимметричной системы освещения и системы формирования изображения с объемными голографическими решетками с угловым мультиплексированием (AMVHG), как показано на рис.1. Асимметричные амплитудные картины получаются с помощью специальной осветительной установки Келлера, которая состоит из широкополосного зеленого светодиодного источника света (LIU525B, THORLAB, λ = 525 нм, Δλ∼80 нм), линзы коллектора (f = 15 см), конденсорная линза (f = 2,54 см) и TFT-панель (ILI9486, 480 × 320 пикселей, размер пикселя = 15 мкм). Панель расположена в передней фокальной плоскости линзы конденсатора. Функция TFT-панели — динамически генерировать асимметричный узор освещения. Два черных и белых полукруглых шаблона диафрагмы (IL и IR) последовательно проецируются для получения двух соответствующих изображений для операции DPC.Часть изображения DPC-VHM состоит из объектива (ULWDMSPlan50X, OLYMPUS) и линзы трубки (MPlanAPO20X, MITUTOYO) для получения системы формирования изображения 4-f, как показано на рис. 1 (b). AMVHG, которые регистрируются в фотополимерном материале фенантренхинон поли (метилметакрилат) (PQ-PMMA), расположены в плоскости Фурье системы формирования изображения 4-f. В данном исследовании AMVHG состоит из трех угловых мультиплексированных решеток.
Панель расположена в передней фокальной плоскости линзы конденсатора. Функция TFT-панели — динамически генерировать асимметричный узор освещения. Два черных и белых полукруглых шаблона диафрагмы (IL и IR) последовательно проецируются для получения двух соответствующих изображений для операции DPC.Часть изображения DPC-VHM состоит из объектива (ULWDMSPlan50X, OLYMPUS) и линзы трубки (MPlanAPO20X, MITUTOYO) для получения системы формирования изображения 4-f, как показано на рис. 1 (b). AMVHG, которые регистрируются в фотополимерном материале фенантренхинон поли (метилметакрилат) (PQ-PMMA), расположены в плоскости Фурье системы формирования изображения 4-f. В данном исследовании AMVHG состоит из трех угловых мультиплексированных решеток.
Рис. 1
Принципиальная схема предлагаемого DPC-VHM с подсветкой Келера.(a) Асимметричное освещение внутри выделенного красного пунктирного прямоугольника и (b) AMVHG-изображения внутри выделенного синего пунктирного прямоугольника (TFT, панель тонкопленочных транзисторов; AMVHGs, объемные голографические решетки с угловым мультиплексированием).
Вектор решетки каждой решетки в AMVHGs, K⇀gi, может быть вычислен как 14 , 18
Ур. (13)
K⇀gi = k⇀ri-k⇀si, I = 1,2,3, где k⇀ri и k⇀ представляют вектор распространения опорного сигнала и луч задается уравнением.(14)
k⇀ri = k sin θri x⇀ + k cos θri z⇀,Ур. (15)
k⇀si = к греху θsix⇀ + к созу θsiz⇀, где θri и θsi является углом падения опорного и сигнальной балку, соответственно, и к = 2π / λ, где λ является операция длиной волны. Следуя предыдущим методам, углы записи для первой решетки равны (θr1 = 30 ° и θs1 = 30 °). 14 Поддержание одинакового угла луча сигнала в качестве первой дифракционной решетки, угол опорного пучка для записи второй и третьей решетки θr2 = 32 ° и θr3 = 34 °, соответственно. Установка записи для AMVHG и объемных голографических решеток с кодированием длины волны (WC-VHG) была создана после нашей предыдущей работы. 19 , 20 В установке используется светоделитель для разделения лазерного источника света на ионах аргона (Ar +) на опорный и сигнальный лучи._EClass_Page_3_Image_0001.jpg) В сигнальном луче сферический волновой фронт создается двумя объективами микроскопа. Осевое положение первой линзы объектива (0,65 NA) контролируется миниатюрным моторизованным линейным столиком.Поэтому линейный столик регулирует положение линзы объектива с осевым смещением (Δz = 50 мкм) линзы объектива для генерации различного волнового фронта сигнального луча для каждой мультиплексированной решетки. 14
В сигнальном луче сферический волновой фронт создается двумя объективами микроскопа. Осевое положение первой линзы объектива (0,65 NA) контролируется миниатюрным моторизованным линейным столиком.Поэтому линейный столик регулирует положение линзы объектива с осевым смещением (Δz = 50 мкм) линзы объектива для генерации различного волнового фронта сигнального луча для каждой мультиплексированной решетки. 14
В системе визуализации AMVHG при условии соответствия по Брэггу, 3 , 18 , 21 действует как многофокусная линза и одновременно отображает разделенные по горизонтали многослойные изображения объемных образцов на ПЗС-матрица, схематически изображенная на рис.1. В системе DPC-VHM, когда объект асимметрично освещен путем проецирования полукруглых узоров на TFT-панель, с помощью AMVHG, три асимметрично освещенных изображения объекта, соответствующих трем различным осевым положениям, одновременно получаются в одном кадре. Изменяя полукруглый узор в противоположном направлении, захватывается другой набор парных изображений из разных фокальных плоскостей. Затем, на основе операции изображения DPC, заданной уравнениями. (1315), многоплоскостные изображения DPC могут быть получены с использованием полученной пары изображений с асимметричным освещением с разных плоскостей без осевого сканирования.
Изменяя полукруглый узор в противоположном направлении, захватывается другой набор парных изображений из разных фокальных плоскостей. Затем, на основе операции изображения DPC, заданной уравнениями. (1315), многоплоскостные изображения DPC могут быть получены с использованием полученной пары изображений с асимметричным освещением с разных плоскостей без осевого сканирования.
2.3.
На основе WC-VHGs DPC-VHM
Для дальнейшего сокращения времени получения изображения представлена вторая конфигурация на основе WC-VHG, которая помогает одновременно получать два изображения с асимметричным освещением в разных направлениях и двумя разными цветами за один снимок. 20 В настоящее время в данной работе показаны только одинарные WC-VHG. На рис. 2 для освещения используется белый светодиодный источник света (LIUCWHA, THORLAB, λ = 425–700 нм). Для генерации света с разной цветовой подсветкой с TFT-панели на TFT-панель проецируется красно-синяя полукруглая маска, которая генерирует два световых узора на объекте, соответствующие двум разным длинам волн. Двухцветная амплитудная маска эквивалентна двум полукругам (I1,1) и (I1,2) соответственно. В нашем случае диаметр кругового рисунка составляет около 3 мм. WC-VHG расположен в плоскости Фурье системы формирования изображения 4-f, которая включает две мультиплексированные решетки, рассчитанные на определенную длину волны λ1 = 633 нм и λ2 = 488 нм, соответственно. WC-VHG для одинарной глубины разработан и записан в PQ: PMMA. Согласно уравнениям. Согласно формуле (57), углы записи для первой решетки равны (θr1 = 45 ° и θs1 = 45 °), а для второй решетки (θr2 = 45 ° и θs2 = 66.524 °). Кроме того, конфигурация предназначена для одного DPC-изображения глубины, поэтому WC-VHG, регистрирующие осевое смещение (Δz), равны нулю во время мультиплексирования.
Двухцветная амплитудная маска эквивалентна двум полукругам (I1,1) и (I1,2) соответственно. В нашем случае диаметр кругового рисунка составляет около 3 мм. WC-VHG расположен в плоскости Фурье системы формирования изображения 4-f, которая включает две мультиплексированные решетки, рассчитанные на определенную длину волны λ1 = 633 нм и λ2 = 488 нм, соответственно. WC-VHG для одинарной глубины разработан и записан в PQ: PMMA. Согласно уравнениям. Согласно формуле (57), углы записи для первой решетки равны (θr1 = 45 ° и θs1 = 45 °), а для второй решетки (θr2 = 45 ° и θs2 = 66.524 °). Кроме того, конфигурация предназначена для одного DPC-изображения глубины, поэтому WC-VHG, регистрирующие осевое смещение (Δz), равны нулю во время мультиплексирования.
Рис. 2
Принципиальная схема DPC-VHM с использованием WC-VHG. (a) Асимметричное освещение внутри выделенного красного пунктирного прямоугольника и (b) изображения WC-VHG внутри выделенного синего пунктирного прямоугольника. TFT-панель используется для создания комбинированного сине-красного полукруга. Белый светодиодный источник для получения цветного освещения (WC-VHG, объемные голографические решетки с кодировкой длины волны).
Белый светодиодный источник для получения цветного освещения (WC-VHG, объемные голографические решетки с кодировкой длины волны).
При условии соответствия по Брэггу, WC-VHG отображает изображения с разной длиной волны с разными углами дифрагирования по отношению к соответствующему разделенному по бокам положению на ПЗС. Следовательно, DPC-VHM, использующий WC-VHG, одновременно получает два изображения с асимметричным освещением в разных направлениях с двумя разными цветами за один снимок.
3.
Результаты
3.1.
DPC-VHM на основе AMVHG
На рисунке 3 (а) показаны экспериментально полученные многоплановые изображения диаграммы разрешающей способности ВВС (AFRC) в условиях светлого поля, которые можно легко получить, подсвечивая TFT-панель с помощью полноразмерного изображения. круг симметричный узор.На рис. 3 (а) два многоплоскостных изображения разделены в осевом направлении на 50 мкм. Глубина разделения плоскости изображения, полученной от AMVHG, может контролироваться параметрами сигнального луча во время процесса записи. Поскольку AFRC представляет собой тонкий образец, изображение на глубине 2 находится в фокусе, а изображение на глубине 1 не в фокусе. В нашем эксперименте хорошо разрешаются латеральные детали размером до 2,46 мкм. На рисунке 3 (b) показаны соответствующие многоплоскостные изображения DPC, полученные с помощью предлагаемой системы DPC-VHM, с использованием асимметричных полукруглых диаграмм освещения.По сравнению с изображениями, полученными с помощью объемного голографического микроскопа в светлом поле, показанными на рис. 3 (а), контрастность высокочастотных элементов с DPC-VHM [рис. 3 (б)], очевидно, улучшается.
Поскольку AFRC представляет собой тонкий образец, изображение на глубине 2 находится в фокусе, а изображение на глубине 1 не в фокусе. В нашем эксперименте хорошо разрешаются латеральные детали размером до 2,46 мкм. На рисунке 3 (b) показаны соответствующие многоплоскостные изображения DPC, полученные с помощью предлагаемой системы DPC-VHM, с использованием асимметричных полукруглых диаграмм освещения.По сравнению с изображениями, полученными с помощью объемного голографического микроскопа в светлом поле, показанными на рис. 3 (а), контрастность высокочастотных элементов с DPC-VHM [рис. 3 (б)], очевидно, улучшается.
Рис. 3
Сравнение многоглубинных снимков AFRC. (а) Изображение диаграммы разрешения с помощью объемного голографического микроскопа в светлом поле. (b) Соответствующие изображения диаграммы разрешения DPC-VHM. Красный прямоугольник указывает на контрастность различных элементов.
Кроме того, мы используем образцы кожицы лука для проверки способности системы DPC-VHM определять особенности слабой фазы. По сравнению с рис. 4 с использованием объемного голографического микроскопа в светлом поле, на рис. 5 показаны изображения DPC-VHM, на которых мелкие детали в образце кожуры лука значительно усиливаются на трех разных глубинах. На рисунках 4 и 5 показан коэффициент контрастности трех выбранных областей интереса, соответствующих одним и тем же местоположениям между светлопольным объемным голографическим микроскопом и DPC-VHM, где красный прямоугольник представляет выбранные элементы вдоль вертикальной линии для трех глубин. Расстояние между каждой глубиной составляет 50 мкм.На глубине 2 в выбранных областях контрастность улучшается с 4,3%, 4%, 1,2% до 23,6%, 76%, 18,5% соответственно с помощью DPC-VHM.
По сравнению с рис. 4 с использованием объемного голографического микроскопа в светлом поле, на рис. 5 показаны изображения DPC-VHM, на которых мелкие детали в образце кожуры лука значительно усиливаются на трех разных глубинах. На рисунках 4 и 5 показан коэффициент контрастности трех выбранных областей интереса, соответствующих одним и тем же местоположениям между светлопольным объемным голографическим микроскопом и DPC-VHM, где красный прямоугольник представляет выбранные элементы вдоль вертикальной линии для трех глубин. Расстояние между каждой глубиной составляет 50 мкм.На глубине 2 в выбранных областях контрастность улучшается с 4,3%, 4%, 1,2% до 23,6%, 76%, 18,5% соответственно с помощью DPC-VHM.
Рис. 4
Три изображения кожи лука с разрешением по глубине, полученные одновременно с помощью светлопольного объемного голографического микроскопа. Нижняя панель соответствует коэффициенту контрастности областей красного прямоугольника на верхней панели на каждой глубине.
Рис. 5
Три изображения кожи лука с разрешением по глубине, полученные одновременно с помощью предлагаемого DPC-VHM. Нижняя панель соответствует коэффициенту контрастности областей красного прямоугольника на верхней панели на каждой глубине.
Чтобы точно сравнить разрешение и производительность наших систем, был проведен анализ передаточной функции модуляции (MTF). РСВС 1951 года была представлена как объект. Сравнение MTF для предлагаемого DPC-VHM и светлопольного объемного голографического микроскопа показано на рис. 6. Кривая MTF для DPC-VHM четко демонстрирует, что компонент низкочастотного члена уменьшается, а контраст, очевидно, увеличивается при высокочастотная область.
Рис. 6
Измерение относительной MTF в направлении y (тангенциальное направление) между светлопольным объемным голографическим микроскопом и DPC-VHM.Результат измерения показывает, что DPC-VHM не только может подавлять составляющую постоянного тока (низкочастотную составляющую), но также, очевидно, может улучшать высокочастотную информацию.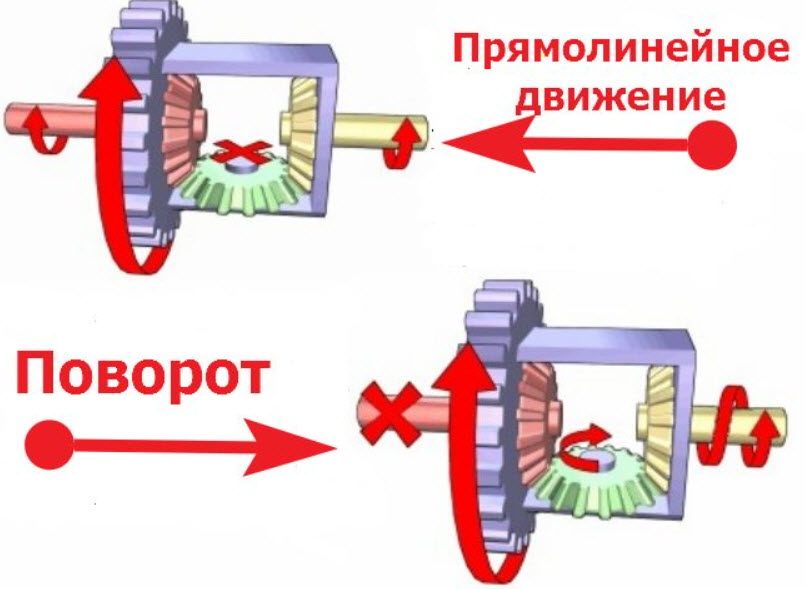
3.2.
WC-VHG на основе DPC-VHM
На рис. 7 проверено свойство WC-VHG по длине волны. TFT-панель подсвечивается белыми светодиодами и действует как цветной фильтр. Полукруглая маска синего и красного цветов последовательно проецируется на TFT-панель и получаются изображения объектов.В соответствии с дифракционными свойствами WC-VHG (который состоит из двух решеток, предназначенных для красного и синего цветов), синие и красные изображения могут дифрагировать в определенное латеральное положение на плоскости CCD, как показано на рис. 7 (а) и 7 (б). Рисунок 7 (c) демонстрирует изображение диаграммы разрешения с проекцией синего и красного комбинированного круга на TFT-панели. На рис. 7 (d) представлено DPC-изображение AFRC на определенной глубине, а штриховая зеленая рамка показывает увеличенное DPC-изображение. В настоящее время было продемонстрировано, что WC-VHG позволяет получать только изображение с одной глубиной, которая может быть дополнительно увеличена путем записи мультиплексированных WC-VHG.
Рис. 7
Результаты изображения AFRC, полученного DPC-VHM с использованием WC-VHG. (а) Изображение, полученное путем проецирования синей полукруглой маски на TFT-панель. (б) Изображение, полученное путем проецирования маски красного полукруга (в противоположном направлении) на TFT-панель. (c) Изображение с асимметричным освещением, полученное из синего и красного комбинированного круга на той же TFT-панели. (d) DPC-изображения целевого разрешения и увеличенное изображение из штриховой зеленой рамки.
Поле зрения DPC-VHM по оси x зависит от полосы пропускания источника света.Для первой конфигурации мы использовали широкополосный зеленый светодиодный источник света (LIU525B, THORLAB) с полосой пропускания около 80 нм. В DPC-VHM на основе AMVHG поле обзора для каждой глубины в направлении x составляет около 350 мкм. Для второй конфигурации мы выбрали белый светодиодный источник света (LIUCWHA, THORLAB), который имеет диапазон спектра излучения от 425 до 700 нм. В DPC-VHM на основе WC-VHG поле обзора для каждого цветного изображения в направлении x составляет 1200 мкм. Объемная голографическая решетка имеет вырождение по оси y.Поле зрения в направлении y определяется размером ограничивающей апертуры. Поперечное и осевое разрешение нашей системы зависит от числовой апертуры (NA) объектива и длины волны освещающего света. В двух конфигурациях DPC-VHM мы используем одну и ту же линзу объектива (ULWDMSPlan50X, OLYMPUS) с NA = 0,55. В экспериментальных результатах наши DPC-VHM могут хорошо разрешить боковые детали размером до 2,46 мкм. Разделение по глубине для двух плоскостей для нашего DPC-VHM составляет около 50 мкм, что может контролироваться параметрами записи объемных голограмм.Мы следовали предыдущей работе по изготовлению объемной голографической подложки и записи голограммы. 14 , 19 Осевое смещение (Δz) сигнального луча составляет 50 мкм во время двух мультиплексных решеток. Увеличивая количество мультиплексных решеток внутри объемной голограммы, можно увеличить глубину измерения DPC-VHM. Например, в предыдущей работе мы показали диапазон глубин около 400 мкм для мультиплексированных решеток большой емкости.
Объемная голографическая решетка имеет вырождение по оси y.Поле зрения в направлении y определяется размером ограничивающей апертуры. Поперечное и осевое разрешение нашей системы зависит от числовой апертуры (NA) объектива и длины волны освещающего света. В двух конфигурациях DPC-VHM мы используем одну и ту же линзу объектива (ULWDMSPlan50X, OLYMPUS) с NA = 0,55. В экспериментальных результатах наши DPC-VHM могут хорошо разрешить боковые детали размером до 2,46 мкм. Разделение по глубине для двух плоскостей для нашего DPC-VHM составляет около 50 мкм, что может контролироваться параметрами записи объемных голограмм.Мы следовали предыдущей работе по изготовлению объемной голографической подложки и записи голограммы. 14 , 19 Осевое смещение (Δz) сигнального луча составляет 50 мкм во время двух мультиплексных решеток. Увеличивая количество мультиплексных решеток внутри объемной голограммы, можно увеличить глубину измерения DPC-VHM. Например, в предыдущей работе мы показали диапазон глубин около 400 мкм для мультиплексированных решеток большой емкости. 14
14
4.
Заключение
Экспериментально продемонстрированы две новые конфигурации DPC-VHM. Для этой цели используются два различных типа объемных голографических решеток. AMVHG в DPC-микроскопии помогают в получении DPC-изображений с неаксиальным сканированием с множественной глубиной разрешения. Анализ MTF системы показывает, что компонент низких пространственных частот уменьшается, тогда как контраст увеличивается для большинства частот. Контрастность изображения можно значительно улучшить с помощью нашего DPC-VHM по сравнению с объемным голографическим микроскопом в светлом поле.Мы обнаружили, что DPC-VHM может одновременно увеличивать контраст мелких деталей в объемном образце, таком как кожица лука, на трех глубинах. Кроме того, мы демонстрируем, что однократная микроскопия DPC возможна с помощью WC-VHG. Наша система освещения динамична и универсальна, и предлагает множество преимуществ. Он может работать в различных микроскопических режимах при разных условиях освещения. Режим светлого поля, режим фазового контраста и режим DPC можно настроить, просто управляя маской на TFT-панели.Представленные конфигурации могут быть использованы для количественных измерений DPC 2 с использованием различных вычислительных алгоритмов.
Режим светлого поля, режим фазового контраста и режим DPC можно настроить, просто управляя маской на TFT-панели.Представленные конфигурации могут быть использованы для количественных измерений DPC 2 с использованием различных вычислительных алгоритмов.
Раскрытие информации
Авторы заявляют об отсутствии конфликта интересов.
Благодарности
Авторы благодарят Чоу-Минь Чиа за ценные обсуждения. Это исследование было поддержано Министерством науки и технологий Тайваня (MOST) (№ MOST 108-2221-E-002-168-MY4) и Национальным университетом Тайваня (№№ 08HZT49001, 108L7714 и 109L7839).
Ссылки
2.
Г. Попеску, Количественная фазовая визуализация клеток и тканей, McGraw Hill Professional (2011). Google ученый3.
Дж. У. Гудман, Введение в оптику Фурье, 491 3-е изд. Робертс и издательство компании (2005). Google ученый9.
Ю.-З. Лин, К.-Ю. Хуанг и Ю. Ло, «Количественная дифференциальная фазово-контрастная визуализация с высоким разрешением и радиально-асимметричным освещением», Опт. Lett., 43
(12), 2973
–2976
(2018).https://doi.org/10.1364/OL.43.002973 OPLEDP 0146-9592 Google Scholar
Lett., 43
(12), 2973
–2976
(2018).https://doi.org/10.1364/OL.43.002973 OPLEDP 0146-9592 Google Scholar11.
Y. Luo et al., «Лазерно-индуцированная флуоресцентная визуализация подповерхностных тканевых структур с помощью системы объемной голографической пространственно-спектральной визуализации», Опт. Lett., 33 (18), 2098 г. –2100 (2008). https://doi.org/10.1364/OL.33.002098 OPLEDP 0146-9592 Google Scholar16.
Н. Деккерс и Х. Де Ланг, «Дифференциальный фазовый контраст в STEM», Оптик, 41 (4), 452 –456 (1974).OTIKAJ 0030-4026 Google ScholarБиография
Ю-Синь Чиа — аспирант кафедры биомедицинской инженерии Национального Тайваньского университета, Тайвань. В 2019 году он получил степень магистра в Институте медицинских устройств и изображений Национального университета Тайваня, Тайвань. В 2017 году он получил степень бакалавра в Университете Чанг Гунг, Тайвань. Его специализация включает систему объемной голографической визуализации, а также оптическую визуализацию и биомедицину. визуализация.
Его специализация включает систему объемной голографической визуализации, а также оптическую визуализацию и биомедицину. визуализация.
Сунил Вьяс получил докторскую степень в области оптики в Индийском технологическом институте Дели, Индия, в 2010 году. Он работал исследователем после получения докторской степени в Институте междисциплинарных исследований перспективных материалов Университета Тохоку, Сендай, Япония, между 2010–2014 годы. С 2014 по 2015 год он работал в качестве постдокторанта в Университете электросвязи, Токио, Япония. С 2016 года он занимал постдокторантуру в Национальном институте медицинских устройств и изображений. Тайваньский университет, Тайвань.Имеет специализацию в области оптики и лазеров.
Цзюй-Чанг Цай — профессор Медицинского колледжа Национального Тайваньского университета, Тайвань. Он получил докторскую степень в аспирантуре Института клинической медицины Медицинского колледжа Национального Тайваньского университета, Тайвань. Он получил степень доктора медицины в Медицинском колледже Тайваньского национального университета. Его специализация — хирургия головного мозга.
Он получил степень доктора медицины в Медицинском колледже Тайваньского национального университета. Его специализация — хирургия головного мозга.
И-Ю Хуан — профессор кафедры биомедицинской инженерии Национального университета Тайваня, Тайвань.Он получил докторскую степень в области химического машиностроения в Тайваньском национальном университете, Тайвань, в 1989 году. Он получил степень магистра в области химического машиностроения в Тайваньском национальном университете, Тайвань, в 1981 году. Он получил степень бакалавра химического машиностроения в Национальном университете Ченг Кунг, Тайвань. в 1979 году. Его специализация — системы доставки лекарств, биоматериалы и тканевая инженерия.
Дж. Эндрю Йе — профессор, назначенный совместно Институтом наноинженерии и микросистем и кафедрой энергетического машиностроения Национального университета Цин Хуа, Тайвань, где его интересы сосредоточены на диэлектрических жидких линзах, датчиках окружающей среды на основе InN и наноструктуры на уровне пластины для био / оптических приложений. Он получил степени магистра машиностроения и электротехники в Корнельском университете в 1996 и 1997 годах соответственно. Он получил докторскую степень в области электротехники в Корнельском университете в 1999 году.
Он получил степени магистра машиностроения и электротехники в Корнельском университете в 1996 и 1997 годах соответственно. Он получил докторскую степень в области электротехники в Корнельском университете в 1999 году.
Юань Луо — профессор Института медицинских устройств и изображений Национального университета Тайваня. Он получил докторскую степень в Колледже оптических наук Университета Аризоны, США, в 2008 году. С 2009 по 2011 год он работал в качестве постдокторанта в лаборатории 3D-оптики факультета машиностроения Массачусетского технологического института.Его научные интересы лежат в области объемной голографической визуализации, микроскопии высокого разрешения и эндоскопии, а также в разработке и разработке пространственно-спектральных голографических компонентов и миниатюрных медицинских устройств.
Дифференциальные игры с асимметричной и коррелированной информацией
Автор
Abstract
Дифференциальные игры с асимметричной информацией были введены Кардаляге (SIAM J Control Optim 46: 816–838, 2007). Как и в повторяющихся играх с недостатком информации с обеих сторон (Ауман и Машлер в Повторных играх с неполной информацией, в сотрудничестве с Р.Stearns, 1995), каждый игрок получает частный сигнал (свой тип) перед началом игры и заранее имеет представление о типе своего противника. Затем разыгрывается дифференциальная игра, в которой динамическая функция и функция выплаты зависят от обоих типов: таким образом, каждый игрок частично информируется о дифференциальной игре, в которую играют. Существование функции цены и некоторые характеристики были получены в предположении, что сигналы рисуются независимо. В данной статье мы отказываемся от этого предположения и распространяем эти результаты на общий случай коррелированных типов.В качестве приложения мы даем новую характеристику асимптотического значения повторяющихся игр с неполной информацией с обеих сторон как единственное двойственное решение уравнения Гамильтона – Якоби. Авторские права Springer Science + Business Media Нью-Йорк 2015
Как и в повторяющихся играх с недостатком информации с обеих сторон (Ауман и Машлер в Повторных играх с неполной информацией, в сотрудничестве с Р.Stearns, 1995), каждый игрок получает частный сигнал (свой тип) перед началом игры и заранее имеет представление о типе своего противника. Затем разыгрывается дифференциальная игра, в которой динамическая функция и функция выплаты зависят от обоих типов: таким образом, каждый игрок частично информируется о дифференциальной игре, в которую играют. Существование функции цены и некоторые характеристики были получены в предположении, что сигналы рисуются независимо. В данной статье мы отказываемся от этого предположения и распространяем эти результаты на общий случай коррелированных типов.В качестве приложения мы даем новую характеристику асимптотического значения повторяющихся игр с неполной информацией с обеих сторон как единственное двойственное решение уравнения Гамильтона – Якоби. Авторские права Springer Science + Business Media Нью-Йорк 2015
Рекомендуемое цитирование
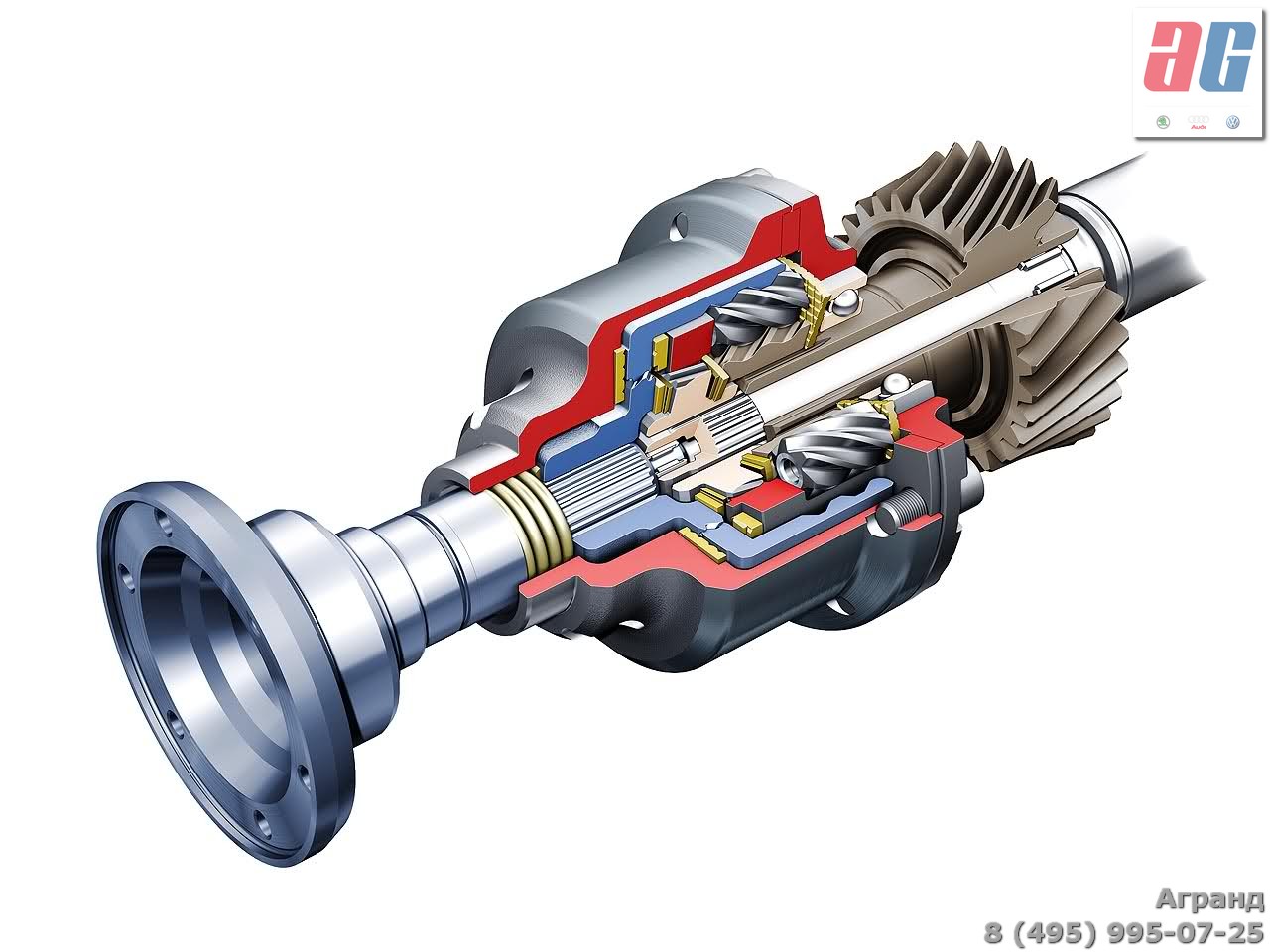 « Дифференциальные игры с асимметричной и коррелированной информацией ,»
Динамические игры и приложения, Springer, vol. 5 (3), страницы 378-396, сентябрь.
« Дифференциальные игры с асимметричной и коррелированной информацией ,»
Динамические игры и приложения, Springer, vol. 5 (3), страницы 378-396, сентябрь.DOI: 10.1007 / s13235-014-0131-1
Скачать полный текст от издателя
Поскольку доступ к этому документу ограничен, вы можете поискать его другую версию.
Список литературы в IDEAS
- Бернар де Мейер, 1996. « Повторяющиеся игры и уравнения в частных производных ,» Université Paris1 Panthéon-Sorbonne (послепечатные и рабочие документы) хал-00259711, HAL.
- Роберт Дж. Ауманн, 1995. « Повторные игры с неполной информацией ,» Книги MIT Press, MIT Press, выпуск 1, том 1, номер 0262011476, сентябрь.
- repec: dau: paper: 123456789/6927 не указан в IDEAS
- Рида Лараки, 2002.
« Игра на разделение и приложения ,»
Международный журнал теории игр, Springer; Общество теории игр, т. 30 (3), страницы 359-376.
- Хойер, М., 1992. « Асимптотически оптимальные стратегии в повторяющихся играх с неполной информацией ,» Международный журнал теории игр, Springer; Общество теории игр, т. 20 (4), страницы 377-392.
- Пьер Кардаляге, Рида Лараки и Сильвен Сорин, 2012.« Непрерывный временной подход для асимптотического значения в повторяющихся играх с нулевой суммой для двух человек », Пост-печать хал-00609476, HAL.
- repec: dau: paper: 123456789/6775 не указан в IDEAS
 30 (3), страницы 359-376.
30 (3), страницы 359-376.Цитаты
Цитаты извлекаются проектом CitEc, подпишитесь на его RSS-канал для этого элемента.
Цитируется по:
- Fabien Gensbittel, 2019.« Марковские игры в непрерывном времени с асимметричной информацией ,» Динамические игры и приложения, Springer, vol. 9 (3), страницы 671-699, сентябрь.
- Сяочи Ву, 2019.
« Infinite Horizon Differential Games с асимметричной информацией ,»
Динамические игры и приложения, Springer, vol. 9 (3), страницы 858-880, сентябрь.
- Фабьен Генсбиттель и Кристин Грюн, 2019 г. « Остановка игр с нулевой суммой и асимметричной информацией ,» Математика исследования операций, ИНФОРМС, т.44 (1), страницы 277-302, февраль.
- Ашкенази-Голан, Галит и Райнер, Кэтрин и Солан, Эйлон, 2020. « Решение марковских игр с двумя состояниями с неполной информацией на одной стороне ,» Игры и экономическое поведение, Elsevier, vol. 122 (C), страницы 83-104.
- Фабьен Генсбиттель и Микель Олю-Бартон, 2020 г. « оптимальных стратегий в повторяющихся играх с нулевой суммой с неполной информацией: зависимый случай », Динамические игры и приложения, Springer, vol.10 (4), страницы 819-835, декабрь.
Самые популярные товары
Это элементы, которые чаще всего цитируют те же работы, что и эта, и цитируются в тех же работах, что и эта.- Микель Олю-Бартон, 2018.
« Игра на раскол: ценность и оптимальные стратегии »,
Динамические игры и приложения, Springer, vol. 8 (1), страницы 157-179, март.
- Фабьен Генсбиттель и Жером Рено, 2015. « Значение игр с цепями Маркова с неполной информацией с обеих сторон ,» Математика исследования операций, ИНФОРМС, т.40 (4), страницы 820-841, октябрь.
- Фредерик Кесслер, Мари Лаклау и Жером Рено и Тристан Томала, 2019 г. « Длинный информационный дизайн ,» Рабочие документы PSE halshs-02400053, HAL.
- Лараки, Рида и Сорин, Сильвен, 2015. « достижений в динамических играх с нулевой суммой », Справочник по теории игр с экономическими приложениями. Эльзевир.
- Фабьен Генсбиттель, 2015. « Расширения теоремы Cav (u) для повторяющихся игр с неполной информацией на одной стороне ,» Математика исследования операций, ИНФОРМС, т.40 (1), страницы 80-104, февраль.
- Фабьен Генсбиттель и Микель Олю-Бартон, 2020 г.
« оптимальных стратегий в повторяющихся играх с нулевой суммой с неполной информацией: зависимый случай »,
Динамические игры и приложения, Springer, vol. 10 (4), страницы 819-835, декабрь.
- Пьер Кардаляге, Рида Лараки и Сильвен Сорин, 2012. « Непрерывный временной подход для асимптотического значения в повторяющихся играх с нулевой суммой для двух человек », Пост-печать хал-00609476, HAL.
- Пьер Кардаляге, Катрин Райнер, Дина Розенберг и Николя Вьей, 2016 г. « Марковских игр с частыми действиями и неполной информацией — предельный случай », Математика исследования операций, ИНФОРМС, т. 41 (1), страницы 49-71, февраль.
- Сильвен Сорин, 2011. « Повторяющиеся игры с нулевой суммой: последние достижения и новые связи с дифференциальными играми », Динамические игры и приложения, Springer, vol. 1 (1), страницы 172-207, март.
- Томала, Тристан и Кесслер, Фредерик и Лаклау, Мари, 2018.» Интерактивный информационный дизайн ,» Серия исследовательских работ HEC 1260, HEC Paris, от 2 мая 2018 г.
- Фабьен Генсбиттель и Кэтрин Райнер, 2018.
« Игра двух игроков с нулевой суммой, в которой только один игрок наблюдает броуновское движение »,
Динамические игры и приложения, Springer, vol. 8 (2), страницы 280-314, июнь.
- Федор Сандомирский, 2018. « О повторяющихся играх с нулевой суммой с неполной информацией и асимптотически ограниченными значениями ,» Динамические игры и приложения, Springer, vol.8 (1), страницы 180-198, март.
- Рида Лараки, 2010. « Явные формулы для повторяющихся игр с поглощающими состояниями ,» Международный журнал теории игр, Springer; Общество теории игр, т. 39 (1), страницы 53-69, март.
- Фабьен Генсбиттель, 2016. « Непрерывный лимит динамических игр с неполной информацией и более информированным игроком ,» Международный журнал теории игр, Спрингер; Общество теории игр, т. 45 (1), страницы 321-352, март.
- Рида Лараки и Жером Рено, 2020 г.» Ациклические азартные игры, ,» Математика исследования операций, ИНФОРМС, т. 45 (4), страницы 1237-1257, ноябрь.
- Дина Розенберг, Эйлон Солан и Николас Вьей, 2003 г.
« Значение MaxMin стохастических игр с несовершенным мониторингом ,»
Международный журнал теории игр, Springer; Общество теории игр, т. 32 (1), страницы 133-150, декабрь.
- Дина Розенберг, Эйлон Солан и Николас Вьей, 2001. « О максимальном минимальном значении стохастических игр с несовершенным мониторингом », Рабочие бумаги хал-00593645, HAL.
- Дина Розенберг, Эйлон Солан и Николас Вьей, 2002. « О максимальном значении стохастических игр с несовершенным мониторингом ,» Рабочие бумаги hal-00242999, HAL.
- Дина Розенберг, Эйлон Солан и Николас Вьей, 2001. « О максимальном минимальном значении стохастических игр с несовершенным мониторингом », Документы для обсуждения 1344, Северо-Западный университет, Центр математических исследований в области экономики и управления.
- Эйлон Солан, Дина Розенберг и Николас Вьей, 2001.« О максимальном минимальном значении стохастических игр с несовершенным мониторингом », Документы для обсуждения 1337, Северо-Западный университет, Центр математических исследований в области экономики и управления.
- Дина Розенберг, Эйлон Солан и Николас Вьей, 2003 г. « Значение MaxMin стохастических игр с несовершенным мониторингом ,»
Пост-печать
хал-00464949, HAL.
- VIEILLE, Nicolas & ROSENBERG, Dinah & SOLAN, Eilon, 2001. « О максимальном значении стохастических игр с несовершенным мониторингом ,» Серия исследовательских работ HEC 760, HEC Paris.
- Дирк Бергеманн и Стивен Моррис, 2019 г.
« Информационный дизайн: единая перспектива «,
Журнал экономической литературы, Американская экономическая ассоциация, т. 57 (1), страницы 44-95, март.
- Дирк Бергеманн и Стивен Моррис, 2017 г. « Информационный дизайн: единая перспектива «, Рабочие бумаги 089_2017, Принстонский университет, Департамент экономики, Программа эконометрических исследований.
- Дирк Бергеманн и Стивен Моррис, 2017 г.» Информационный дизайн: единая перспектива «, Документы для обсуждения фонда Cowles 2075R2, Фонд исследований экономики Коулза, Йельский университет, пересмотрено в ноябре 2017 г.
- Дирк Бергеманн и Стивен Моррис, 2017 г. « Информационный дизайн: единая перспектива «,
Документы для обсуждения фонда Cowles
2075R, Фонд исследований экономики Коулза, Йельский университет, пересмотрено в марте 2017 г.
- Дирк Бергеманн и Стивен Моррис, 2017 г. « Информационный дизайн: единая перспектива «, Документы для обсуждения фонда Cowles 2075, Фонд исследований в области экономики Коулза, Йельский университет.
- Дирк Бергеманн и Стивен Моррис, 2017 г. « Информационный дизайн: единая перспектива «, Документы для обсуждения фонда Cowles 2075R3, Фонд исследований экономики Коулза, Йельский университет, пересмотрено в марте 2018 г.
- Бергеманн, Дирк и Моррис, Стивен, 2017. « Информационный дизайн: единая перспектива «, Документы для обсуждения CEPR 11867, C.E.P.R. Документы для обсуждения.
- Андрей Косенко, 2020. « опосредованное убеждение ,» Статьи 2012 г.00098, arXiv.org, пересмотрено в декабре 2020 г.
- Vida, Péter & zacis, Helmuts, 2013. « Посредник без деталей ,»
Игры и экономическое поведение, Elsevier, vol. 81 (C), страницы 101-115.
- Фредерик Кесслер и Франсуаза Форж, 2008 г.
« Многоступенчатая связь с проверяемыми типами и без них »,
Международный обзор теории игр (IGTR), World Scientific Publishing Co. Pte. Ltd., т. 10 (02), страницы 145-164.
- Фредерик Кесслер и Франсуаза Форж, 2006.» Многоступенчатая связь с проверяемыми типами и без них ,» THEMA Рабочие документы 2006-14, ТЕМА (Теория экономики, моделирование и приложения), Университет Сержи-Понтуаз.
- Фредерик Кесслер и Франсуаза Форж, 2008 г. « Многоступенчатая связь с проверяемыми типами и без них ,» Пост-печать хал-00360739, HAL.
- Фредерик Кесслер и Франсуаза Форж, 2008 г. « Многоступенчатая связь с проверяемыми типами и без них ,» PSE-Ecole d’économie de Paris (Постпринт) хал-00360739, HAL.
 8 (1), страницы 157-179, март.
8 (1), страницы 157-179, март. 10 (4), страницы 819-835, декабрь.
10 (4), страницы 819-835, декабрь. 8 (2), страницы 280-314, июнь.
8 (2), страницы 280-314, июнь. 32 (1), страницы 133-150, декабрь.
32 (1), страницы 133-150, декабрь. « Значение MaxMin стохастических игр с несовершенным мониторингом ,»
Пост-печать
хал-00464949, HAL.
« Значение MaxMin стохастических игр с несовершенным мониторингом ,»
Пост-печать
хал-00464949, HAL. « Информационный дизайн: единая перспектива «,
Документы для обсуждения фонда Cowles
2075R, Фонд исследований экономики Коулза, Йельский университет, пересмотрено в марте 2017 г.
« Информационный дизайн: единая перспектива «,
Документы для обсуждения фонда Cowles
2075R, Фонд исследований экономики Коулза, Йельский университет, пересмотрено в марте 2017 г.Исправления
Все материалы на этом сайте предоставлены соответствующими издателями и авторами. Вы можете помочь исправить ошибки и упущения. При запросе исправления укажите идентификатор этого элемента: RePEc: spr: dyngam: v: 5: y: 2015: i: 3: p: 378-396 . См. Общую информацию о том, как исправить материал в RePEc.
Вы можете помочь исправить ошибки и упущения. При запросе исправления укажите идентификатор этого элемента: RePEc: spr: dyngam: v: 5: y: 2015: i: 3: p: 378-396 . См. Общую информацию о том, как исправить материал в RePEc.
По техническим вопросам, касающимся этого элемента, или для исправления его авторов, названия, аннотации, библиографической информации или информации для загрузки, обращайтесь: (Sonal Shukla) или (Springer Nature Abstracting and Indexing).Общие контактные данные провайдера: http://www.springer.com .
Если вы создали этот элемент и еще не зарегистрированы в RePEc, мы рекомендуем вам сделать это здесь. Это позволяет связать ваш профиль с этим элементом. Это также позволяет вам принимать возможные ссылки на этот элемент, в отношении которого мы не уверены.
Если CitEc распознал ссылку, но не связал с ней элемент в RePEc, вы можете помочь с этой формой .
Если вам известно об отсутствующих элементах, цитирующих этот элемент, вы можете помочь нам создать эти ссылки, добавив соответствующие ссылки таким же образом, как указано выше, для каждого элемента ссылки. Если вы являетесь зарегистрированным автором этого элемента, вы также можете проверить вкладку «Цитаты» в своем профиле службы авторов RePEc, поскольку там могут быть некоторые цитаты, ожидающие подтверждения.
Если вы являетесь зарегистрированным автором этого элемента, вы также можете проверить вкладку «Цитаты» в своем профиле службы авторов RePEc, поскольку там могут быть некоторые цитаты, ожидающие подтверждения.
Обратите внимание, что на фильтрацию исправлений может уйти несколько недель. различные сервисы RePEc.
Явлений Скибы в марковских совершенных равновесиях асимметричных дифференциальных игр — Исследовательский портал Тилбургского университета
@inbook {b05cfa2ed31b466383715dabf8ef16af,
title = «Феномены Скибы в марковских совершенных равновесиях асимметричных дифференциальных игр»,
аннотация Марковских-Совершенных-Равновесий, которые приводят к сосуществованию локально устойчивых стационарных состояний в асимметричных дифференциальных играх.Рассмотрены стратегические взаимодействия между действующим на рынке игроком и потенциальным конкурентом, который пытается выйти на рынок через инновационный продукт. В то время как потенциальный участник инвестирует в накопление запаса знаний, который необходим для инновационной продукции, действующий игрок пытается сократить этот запас посредством вмешательств. Показано, что при наличии верхних границ инвестиционной деятельности обеих фирм существует идеальное Марковское равновесие, при котором, в зависимости от начальных условий, запас знаний сходится либо к положительному установившемуся состоянию, тем самым вызывая вероятность входа, равную единице. , или до устойчивого состояния с нулевым знанием потенциального участника.В последнем случае вероятность входа близка к нулю. Показано, что это Марковское идеальное равновесие характеризуется разрывной функцией стоимости для действующего оператора, и обсуждается, что эта особенность тесно связана с существованием верхних границ инвестиций игроков. Устранение этих ограничений в целом ставит под угрозу существование Марковского-Совершенного-Равновесия с множеством локально устойчивых стационарных состояний. «,
author =» H. Давид и М. Кеула и Питер Корт «,
год =» 2016 «,
язык =» английский «,
страниц =» 63-76 «,
редактор =» H.Давид и К.Ф. Дёрнер, Г. Файхтингер, П. М. Корт и А. Зейдл «,
М. Корт и А. Зейдл «,
booktitle =» Динамические перспективы принятия управленческих решений «,
publisher =» Springer International Publishing AG «,
address =» Switzerland «,
}
Этот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Есть много причин, по которым cookie не может быть установлен правильно.Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались.
Чтобы принять файлы cookie с этого сайта, используйте кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом.Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie. Вы должны отключить приложение при входе в систему или уточнить у системного администратора.

Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу.Чтобы предоставить доступ без файлов cookie
потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта.Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
.